Дипломная работа: Разработка системы для моделирования радиолокационной обстановки, которая бы позволила получать файлы на персональной ЭВМ, содержащие цифровое представление радиолокационной обстановки
E 0 – амплитуда отраженного сигнала от доминирующего излучателя, В;
σ2 – дисперсия ортогональных составляющих амплитуд, В2 ;
I 0 – модифицированная функция Бесселя первого рода нулевого порядка:
 (13)
(13)
В случае группового излучателя, состоящего из n точечных излучателей, диаграмма распределения ЭПР по азимутам имеет весьма сложную лепестковую структуру, зависящую от взаимного расположения отражающих элементов и относительно расстояний между ними. Поэтому групповые цели в зависимости от их углового положения относительно линии визирования могут давать значительные колебания мощности отраженных сигналов. Эти колебания происходят относительно среднего уровня, пропорционального среднему значению ЭПР при некогерентном сложении. Одновременно с колебаниями мощности отраженного сигнала наблюдаются случайные изменения времени его запаздывания и угла прихода.
Для движущихся распределенных целей возникает явление интерференции колебаний вторичного излучения от различных точек, в основе которого лежит изменение взаимного расположения точечных отражателей цели. Эффект Доплера является следствием данного эффекта. Для описания явления применяется диаграмма обратного рассеяния (ДОР), которая характеризует зависимость амплитуды отраженного сигнала от направления /2/.
Кроме того, при облучении целей возникает явление деполяризации зондирующего сигнала, т.е. поляризация отраженной и падающей волны не совпадают. Для реальных целей имеет место флуктуирующая поляризация, т.е. все элементы поляризационной матрицы /1/ являются случайными и необходимо воспользоваться матрицей числовых характеристик этих случайных величин.
При статистическом подходе к анализу радиолокационных объектов для описания функций последних применяется корреляционная функция или корреляционная матрица /8/, которые характеризуют изменение параметров объекта во времени. Недостатком данной модели является сложность расчетов из-за необходимости применения статистических методов и сложность организации ввода исходных параметров.
Исходя из вышесказанного, для описания радиолокационного объекта необходимо знать его положение в пространстве, протяженность по дальности и азимуту (для распределенных объектов), ЭПР и модель ее распределения, модель движения объекта или закон изменения доплеровского приращения частоты отраженного сигнала, число точечных излучателей (для групповых излучателей).
2.2 Математическая модель РЛС
Как уже отмечалось в пункте 1.1, основными модулями РЛС являются блок антенны, совместно с антенным переключателем, передатчик и приемное устройство. В качестве оконечного устройства может быть использован большой класс разнообразных устройств, различающихся по способу отображения информации и не влияющих на принимаемые радиолокационные сигналы, поэтому данный класс устройств не рассматривается.
2.2.1 Математическая модель антенны
Одной из основных характеристик антенны является ее диаграмма направленности (ДНА) /5/, которая характеризует зависимость излучаемой мощности от направления (рисунок 2.3).
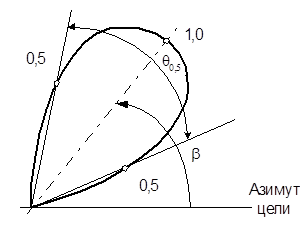
Рисунок 2.3 – Диаграмма направленности антенны по мощности
Диаграмма направленности антенны в плоскости азимут-дальность при постоянном угле места с равномерным распределением поля по раскрыву выражается функцией:
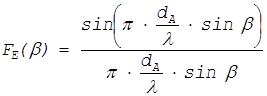 (14)
(14)
Угол β при равномерном движении антенны по окружности можно найти по формуле:
![]() (15)
(15)
где ω – угловая скорость вращения антенны, рад/с.
Рассмотрим форму отраженного сигнала в РЛС кругового обзора. По мере вращения антенны амплитуда зондирующих импульсов, облучающих цель, изменяется в соответствии с диаграммой направленности. Таким образом, зондирующий сигнал, облучающий цель, оказывается модулированным и описывается функцией времени
![]() (16)
(16)
где s П ( t ) – радиоимпульсы передатчика.
Предположим, что цель практически не изменяет длительность отраженных импульсов, а также движением цели за время облучения можно пренебречь. Тогда отраженный сигнал характеризуется функцией:
![]() (17)
(17)
где k – постоянный коэффициент.
Для одно-антенной РЛС, у которой диаграмма направленности антенны при приеме описывается той же функцией FE ( t ) , что и при передаче, сигнал на входе приемника записывается в виде:
![]() (18)
(18)
Т.к. скорость вращения антенны сравнительно невелика и смещение луча за время запаздывания гораздо меньше, чем ширина диаграммы направленности, то FE ( t )≈ FE ( t – t З ) . Кроме того, функция, характеризующая диаграмму направленности по мощности: