Дипломная работа: Разработка системы для моделирования радиолокационной обстановки, которая бы позволила получать файлы на персональной ЭВМ, содержащие цифровое представление радиолокационной обстановки
– функция обмена данными с доступными аппаратными ресурсами – непосредственно организация обмена данными со специализированным устройством под управлением ранее выбранного драйвера.
3. Организация обмена данными с внешними приложениями – необходимо организовать обмен данными с другими приложениями в виде графической информации и информации, которая может быть использована для организации процесса моделирования, самими результатами моделирования.
4. Моделирование радиолокационной обстановки – по введенным пользователем данным, необходимо произвести расчет сигналов, образующих радиолокационную обстановку.
2 Разработка математического обеспечения
В настоящее время моделирование различных процессов и явлений широко используется для разнообразнейших исследований и разработок в различных областях науки и техники. Применение современной вычислительной техники позволяет получать достаточно точные модели, максимально точно описывающие моделируемое явление или процесс. Наиболее широко используется математическое и имитационное моделирование.
В основе математического моделирования лежат математические модели – каждый процесс или явление описывается при помощи математических уравнений, что требует серьезного математического аппарата. Реализация математических моделей на ПЭВМ возможна при использовании численных методов для реализации различных математических функций и операторов, что вносит погрешность в расчеты.
Имитационное моделирование подразумевает получение и использование модели, описывающее механику процесса или явления, т.е. то, как протекает процесс в реальной обстановке и что лежит в основе этого процесса. Имитационное моделирование, в основном, опирается на физические законы, для реализации которых также необходим аппарат математических функций.
Наиболее приемлемым способом для описания моделируемой предметной области в данном дипломном проекте может служить имитационное моделирование, основанное на математических моделях некоторых атомарных объектов. В качестве такого объекта, как будет показано ниже, можно взять точечную цель, а всю модель РЛС разделить на модели основных ее модулей. В этом случае будет достигнут компромисс между точностью модели и суммарными вычислительными затратами на реализацию модели.
2.1 Математическая модель радиолокационной обстановки
Радиолокационная обстановка характеризуется расположением и характером радиолокационных объектов (целей) в зоне действия РЛС, а также условиями окружающей среды, оказывающими влияние на распространение радиолокационных сигналов.
При распространении радиоволн следует учитывать явление дисперсии волн, т.е. зависимость фазовой скорости от частоты сигнала. Явление дисперсии наблюдается вследствие того, что коэффициент преломления атмосферы отличается от единицы, т.е. скорость электромагнитных волн в этом случае несколько меньше скорости света.
Другим существенным эффектом распространения радиоволн в реальной среде является искривление направления распространения или рефракция волн. Это явление может возникнуть в неоднородной среде, т.е. среде с изменяющимся от точки к точке коэффициентом преломления /4/.
Поскольку все эти эффекты слабо изменяют характеристики радиолокационного сигнала, то ими можно пренебречь.
Любая радиолокационная цель или объект характеризуется своим местоположением в пространстве, параметрами движения, эффективной отражающей поверхностью (ЭПР), а также функцией распределения ЭПР по поверхности объекта (для распределенных объектов).
Местоположение объекта (цели) характеризуется положением центра масс этого объекта (цели) в некоторой опорной системе координат /2/. В радиолокации наиболее часто применяют местную сферическую систему координат, начало которой находится в точке размещения антенны РЛС.
В наземной РЛС одна из осей координатной системы обычно совпадает с северным направлением меридиана, проходящего через позицию антенны РЛС, и местоположением цели Ц находится по результатам измерения наклонной дальности D , азимута α и угла места β (рисунок 2.1). При этом система неподвижна относительно земной поверхности.
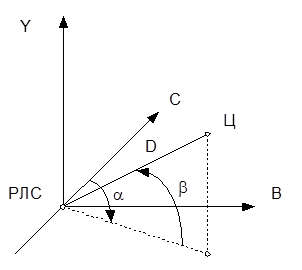
Рисунок 2.1 – Местные сферические координаты
Измерение дальности до цели радиотехническими методами основано на постоянстве скорости и прямолинейности распространения радиоволн, которые выдерживаются в реальных условиях с достаточно большой точностью. Измерение дальности сводится к фиксации моментов излучения зондирующего сигнала и приема отраженного сигнала и измерению временного интервала между этими двумя моментами. Время запаздывания отраженного импульса:
![]() (1)
(1)
где D – расстояние между РЛС и целью (рисунок 2.1), м;
c – скорость распространения радиоволн, м/с.
Для определения радиальной скорости движущегося объекта используют эффект Доплера /3/, который заключается в изменении частоты наблюдаемых колебаний, если источник и наблюдатель движутся друг относительно друга. Поэтому задача определения радиальной скорости сводится к определению частоты отраженных колебаний по сравнению с излучаемыми. Простейший и наиболее удобный для радиолокации вывод количественных соотношений при эффекте Доплера основан на рассмотрении процесса «передача – отражение – прием» как единого. Пусть в антенну поступают колебания:
![]() (2)
(2)
Отраженный от неподвижной цели и запаздывающий на время t З сигнал на входе приемника будет иметь вид:
![]() (3)
(3)
Здесь имеет место сдвиг фаз:
![]() (4)
(4)
а также постоянный сдвиг фаз φЦ , возникающий при отражении. При удалении от РЛС с постоянной радиальной скоростью дальность.
![]() (5)
(5)