Дипломная работа: Управление асинхронным двигателем
ограниченная низкоскоростными электроприводами область применения, необходимость изготовления специальной машины или переделка серийной, применение специальных устройств для механического сочленения валов, невозможность применения в запыленных и агрессивных средах, что обусловлено наличием датчиков на валу и внутри машины;
высокая сложность технической реализации, обусловленная наличием сложных технических устройств: координатного преобразования, векторных фильтров, фазовращателей, функциональных преобразователей, блоков коррекции мгновенного значения частоты;
наличие большого числа датчиков, осуществляющих высоковольтную гальваническую развязку;
невысокая надежность, что обусловлено наличием датчиков на валу и внутри машины, высокой сложностью технической реализации блоков АСР, датчиков, осуществляющих высоковольтную гальваническую развязку.
1.2 Техническое описание системы
В основе математического описания АД при переменной частоте питающей сети лежит общая теория электрических машин.
Основой для математического описания АД служат уравнения, составленные в фазовых координатах. Особенностью АД является совокупность магнитосвязанных цепей с коэффициентами само- и взаимоиндукции, периодически изменяющимися в функции угла поворота ротора относительно статора. В зависимости от степени насыщения магнитной системы машины, эти коэффиценты могут зависеть еще и от токов во всех обмотках. Уравнения могут быть составлены либо в трехфазной системе координат, либо в двухфазной для обобщенной машины. При записи уравнений в фазовых координатах получают систему дифференциальных уравнений высокого порядка ( в трехфазной системе координат число уравнений равно 14) с переменными коэффициентами. Пользоваться такой системой для исследования электромеханических процессов, происходящих в АД не представляется возможным в связи с громоздкостью, наличием переменных коэффициетов, нелинейностью. Дальнейшее упрощение и преобразование исходной системы уравнений основывается на следующем общем методе. При этом уравнения в фазовых координатах преобразуются к уравнениям, выраженным через обобщенные (результирующие) векторы, вводится система относительных единиц для токов, напряжений, потокосцеплений, скоростей вращения, частот, моментов, активных, индуктивных сопротивлений. Введение системы относительных единиц упрощает вид уравнений, а выражение переменных через результирующие векторы приводит к виду дифференциальных уравнений, при котором коэффициенты дифференциальных уравнений ненасыщенной машины являются постоянными величинами. Для насыщенной машины необходимо вводить зависимость величин этих коэффициентов от магнитного состояния машины.
После указанных преобразований получают систему дифференциальных уравнений шестого порядка с постоянными коэффициентами, что значительно упрощает описание АД и делает возможным использование этой системы для ииследования электромеханических процессов, протекающих в АД. Дальнейшее преобразование полученной системы уравнений сводится к переводу векторов, входящих в уравнение, в различные системы координат (в зависимости от цели решаемой задачи).
При математическом описании АД принят ряд допущений, соответствующих идеализированному представлению АД:
фазные обмотки сииметричны, одинаковы, воздушный зазор по все окружности ротора одинаков;
не учитываются потери в стали, а также высшие гармоники магнитодвижущей силы и рабочего потока;
параметры АД постоянны и не зависят от токов в обмотках АД;
системы питающих токов (напряжений) симметричны.
Технические характеристики рассматриваемого АД приведены в таблице 1
Таблица 1
| Наименование параметров | Электродвигатель АО2-52-4 |
| 1. Номинальная мощность, Pн | 10 кВт |
| 2. Номинальное напряжение (фазное), Uн | 220 В |
| 3. Номинальный (фазный) ток, Iн | 19 А |
| 4. Номинальная скорость, h | 1460 об/мин |
| 5. Номинальный момент, Mн | 65.4 н.м. |
| 6. Момент инерции, J | 0.09 кг×м2 |
| 7. Число пар полюсов, 2p | 4 |
| 8. Номинальная частота, fн | 50 Гц |
| 9. Активное сопротивление статора, rs | 0.45 Ом |
| 10. Активное сопротивление ротора, rr | 0.7 Ом |
| 11. Индуктивность рассеяния статора, ld s | 43×10-4 Гн |
| 12. Индуктивность рассеяния ротора, ld r | 51×10-4 Гн |
| 13. Взаимная индуктивность статора и ротора, Lm | 0.1045 Гн |
Система уравнений для идеализированного трехфазного короткозамкнутого АД в системе координат, вращающейся с поизвольной скоростью wк с использованием системы относительных единиц согласно [ ], имеет вид:
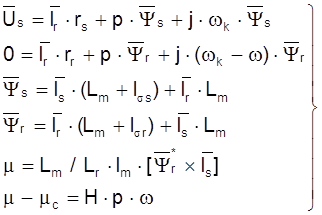
где![]() - обобщенные векторы, соответственно, напряжения, тока, потокосцепления статора;
- обобщенные векторы, соответственно, напряжения, тока, потокосцепления статора;
![]() - обобщенные векторы, соответственно, тока и потокосцепления ротора;
- обобщенные векторы, соответственно, тока и потокосцепления ротора;
![]() - активные сопротивления, соответственно, статора и ротора;
- активные сопротивления, соответственно, статора и ротора;
Lm - взаимная индуктивность статора и ротора;
![]() - индуктивность рассеяния, соответственно, статора и ротора;
- индуктивность рассеяния, соответственно, статора и ротора;
![]() - соответственно, электромагнитный момент и момент сопротивления на валу АД;
- соответственно, электромагнитный момент и момент сопротивления на валу АД;
H - момент инерции ротора АД;
w - угловая скорость вращения ротора АД;
p - символ дифференцирования по времени.
Установившемуся режиму работы АД (все производные в фомуле равны нулю) системе соответствует T-образная схема замещения АД, изображенная на рисунке 1, где Im - ток намагничивания АД; w1 - частота питающей сети.
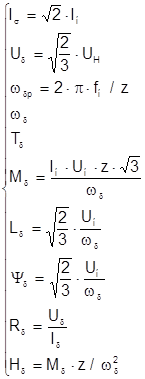
При математическом описании АД принята система относительных единиц, базовые значения которой определяются системой: