Дипломная работа: Управление асинхронным двигателем
Общим недостатком законов с поддержанием постоянства потокосцепления являются: низкая надежность, обусловленная наличием датчиков, встраиваемых в двигатель, и потери в стали при работе двигателя с нагрузочным моментом меньше номинального. Эти потери вызваны необходимостью поддержания постоянного номинального потокосцепления в различных режимах работы.
Существенно повысить КПД двигателя можно путем регулирования магнитного потока статора (ротора) в зависимости от величины нагрузочного момента (скольжения). Недостатками такого управления являются низкие динамические характеристики привода, обусловленные большой величиной постоянной времени ротора, из-за чего магнитный поток машины восстанавливается с некоторой задержкой и сложность технической реализации системы управления.
На практике группа законов с постоянством магнитного потока получила распространение для динамичных электроприводов, работающих с постоянным моментом сопротивления на валу и с частыми ударными приложениями нагрузки. В то время как группа законов с регулированием магнитного потока в функции нагрузки на валу применяется для низкодинамичных электроприводов и для приводов с “вентиляторной” нагрузкой.
В то же время существует ряд приводов таких механизмов как насосы, компрессоры, конвейеры и т. д., которые занимают промежуточное положение между динамичными и низкодинамичными, и для которых существующие системы не в полной мере удовлетворяют предъявляемым к этим приводам требованиям. Высокодинамичные привода имеют сложную систему управления и повышенные энергетические потери при недогрузе двигателей, а низкодинамичные привода не всегда способны отработать быстрые изменения статического момента.
На основании вышесказанного можно сделать вывод, что существующие системы не в полной мере отвечают требованиям, предъявляемым к электроприводам c асинхронными двигателями.
Учитывая, что в настоящее время большинство приводов таких механизмов как вентиляторы, насосы, компрессоры и т. д. имеют нерегулируемый привод, актуальной является задача выбора системы управления. Причем система управления должна обеспечивать достаточно высокое быстродействие, надежность и высокие энергетические характеристики привода.
Как уже было отмечено, высокими энергетическими характеристиками обладают системы с регулированием магнитного потока в функции нагрузки. Увеличить их динамические характеристики можно путем форсировки статорного напряжения (тока) во время переходных процессов и частых формирований управляющих воздействий. Получить высокую надежность можно за счет применения упрощенной системы регулирования, отказа от встроенных в двигатель и механически связанных с ротором датчиков.
На рис. показана структурная схема системы, поддерживающей постоянство угла между векторами тока статора (I1) и потокосцепления ротора (Y2) , что равнозначно поддержанию постоянства относительного скольжения двигателя. Система управления состоит из: задатчика интенсивности (1); программируемого контроллера (2); блока широтно - импульсного модулятора (3); асинхронного электродвигателя с короткозамкнутым ротором (4); датчика тока (5) и блока определения угла (6). Поддержание постоянства угла между I1 и Y2 обеспечивает работу двигателя в области номинального режима с максимальными значениями КПД и cos(j). Кроме того, привод, обладая абсолютно жесткой механической характеристикой, что обусловлено постоянством относительного скольжения, получает возможность точного регулирования скорости вращения ротора путем изменения частоты поля.
Для технической реализации системы с поддержанием постоянства коэффициента полезного действия электродвигателя необходимо знать либо мгновенные величины относительного скольжения либо величину угла между током статора и потокосцеплением ротора. Измерить скольжение можно с помощью электромеханического или цифрового датчика скорости, угол между I1 и Y2 - с помощью датчиков напряжения и датчиков фазных токов. Так как датчик скорости существенно повышает стоимость системы регулирования, эксплуатационные затраты и ухудшает общую надежность системы, то более предпочтителен вариант системы с обратной связью по углу между векторами тока статора и потокосцепления ротора.
Существующие в настоящее время методы определения угла между I1 и Y2 , например [1, 2, 3], имеют низкое быстродействие (не более шести измерений искомого угла за один оборот вектора поля) и невысокую точность измерения, обусловленную “дрейфом нуля” аналоговых элементов схемы и вводом в алгоритм определения углов активного сопротивления статора, значение которого изменяется в широких пределах при нагреве двигателя.
Рассмотрим алгоритм определения угла между I1 и Y2 , лишенный вышеуказанных недостатков. Для обоснования алгоритма построим векторную диаграмму асинхронного двигателя с короткозамкнутым ротором, отложив вдоль действительной оси Ra ток намагничивания I0 , определенный по известным реактивным параметрам асинхронного двигателя и измеренным значениям фазных токов и напряжений [4].
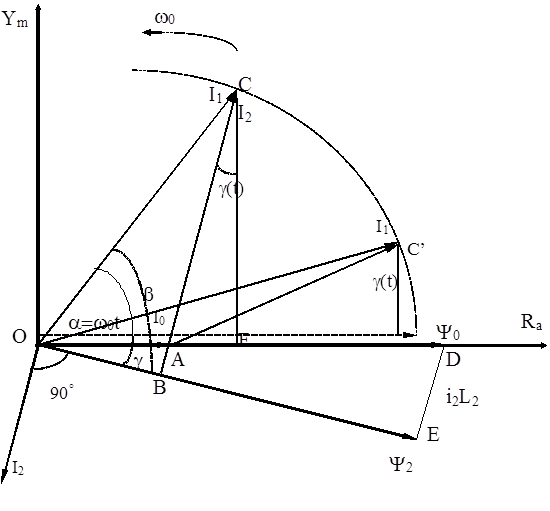
Значение углов между I1 и Y2 можно определить в реальном масштабе времени, когда вращение вектора тока статора статора I1 определяется частотой питания асинхронного двигателя и в ускоренном масштабе времени, когда вращение вектора тока I1 определяется в модели выбранным шагом временного интервала и быстродействием микропроцессорной системы. Второй вариант измерения углов более предпочтителен, так как позволяет осуществить больше измерений. По измеренным значениям фазных токов двигателя определяем величину вектора тока I1 и совмещаем его в модели с действительной осью Ra, а затем переводим (в произвольный момент времени t1 ) вектор тока I1 в неподвижную, относительно статора, систему координат, то есть начинает выполняться программа, согласно которой вектор тока I1 поворачивается против часовой стрелки со скоростью, определяемой быстродействием микропроцессорной системы и выбранным шагом временного интервала.
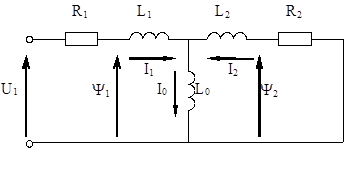
Из Т-образной схемы замещения (рис. 3) видно, что ![]() , то есть векторы тока и потокосцепления ротора взаимно перпендикулярны. В процессе поворота угол между векторами I0 и Y2 g(t) будет изменяться согласно выражения:
, то есть векторы тока и потокосцепления ротора взаимно перпендикулярны. В процессе поворота угол между векторами I0 и Y2 g(t) будет изменяться согласно выражения:  (1), где a=w0 t - текущий угол между вектором тока статора и действительной осью Ra. В момент времени t2 вектор тока статора I1 займет положение OC, при котором векторы тока ротора I2 и потокосцепления ротора Y2 взаимно перпендикулярны, то есть g(t2 )=g.
(1), где a=w0 t - текущий угол между вектором тока статора и действительной осью Ra. В момент времени t2 вектор тока статора I1 займет положение OC, при котором векторы тока ротора I2 и потокосцепления ротора Y2 взаимно перпендикулярны, то есть g(t2 )=g.
Из рис. видно, что при g(t2 )=g выполняется соотношение:
I1 ×sinb=BC=AC+AB.
Величина отрезка AB определяется из подобия треугольников OBA и OED:  .
.
Так как AC = i2 (из векторной диаграммы), то
BC = I2 +  =
=  .
.
Величина отрезка AC определяется из треугольника АFC:
![]() (2).
(2).
Таким образом, изменяющийся во времени угол g(t) будет равен углу между векторами тока намагничивания I0 и потокосцепления ротора Y2 асинхронного двигателя в момент выполнения равенства:
 . (3)
. (3)
Из векторной диаграммы (рис. ) видно, что искомый угол b между векторами тока статора I1 и потокосцепления ротора Y2 будет определяться как:
b = a(t2 ) + g(t2) = w0 ×t + g
2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ
2.1 Наименование и область применения
Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем.