Контрольная работа: Автоматизация системного проектирования
От элементов строки 2 отнимает соответствующие элементы строки 3, умноженные на 2.
От элементов строки F отнимает соответствующие элементы строки 3, умноженные на -6.
|
базисные переменные | x1 | x2 | x3 | x4 | x5 |
свободные члены | отношение |
| x1 | 1 | 0 | 1/4 | 0 | 0 | 5 | - |
| x4 | 0 | 0 | -1/8 | 1 | -1/2 | 29/2 | - |
| x2 | 0 | 1 | -1/16 | 0 | 1/4 | 35/4 | - |
| F | 0 | 0 | 9/8 | 0 | 3/2 | 165/2 | - |
На основании F строки полученной симплекс таблицы, выпишем выражение функции
F = 165/2 -9/8 x3 -3/2 x5
Учитывая, что все x i ≥0 по условию задачи, наибольшее значение функции равно свободному члену 165/2.
Другими словами, учитывая правило формирования симплекс таблицы, критерием получения оптимального решения является отсутствия отрицательных элементов в строке F ( свободный член может быть отрицательным). Что мы непосредственно и получили.
Теперь можем записать ответ.
Ответ :
X опт = ( 5 , 35/4 , 0 , 29/2 , 0 )
Значение функции : F = 165/2
Задание 2. Имитационное моделирование. Сети Петри
2.1 Построить имитационную модель гибкого производственного
модуля
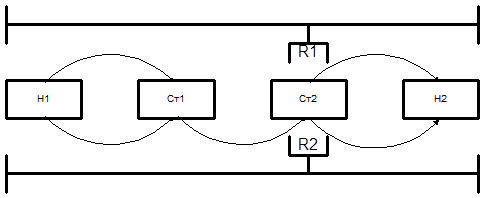
Считаем, что каждый компонент R1, R2, Ст1, Ст2 загружены только одной деталью. Элементы модуля выполняют свои операции независимо друг от друга, R1 (R2) начинает свои транспортировки когда на одном из конвейеров есть деталь. Построить имитационную модель ГПМ.
Решение
Имитационные модели. Основными требованиями к имитационным моделям ГПС являются адекватность модели, максимальная приближенность алгоритмов к методологии объектного программирования и универсальность, как возможность представления всего множества дискретных состояний системы. Использование в имитационном моделировании сетей Петри, как наиболее универсального и часто встречающегося метода формализации имитационных моделей, в большинстве случаев, ограничено построением несложных циклических моделей для роботизированных комплексов и гибких производственных модулей (ГПМ) с обозримым количеством состояния системы. Попытки создания моделей для более сложных систем – гибких производственных участков и комплексов с различным составом многочисленного основного и вспомогательного оборудования, широким спектром номенклатуры деталей ограничивает область применения аппарата сетей Петри в виду большого количества дискретных состояний ГПС, сложности и множественности сетевых структур.
Примером системы позволяющей управлять ГПС может служить пакет моделирования FMSim. Он позволяет размещать в различных позициях планировки любое количество гибких производственных систем , транспортных систем, складов и строить модели расписаний для различных компоновок. При моделировании ГПС данным образом можно выделить следующие особенности:
1) за счет свойства масштабирования сети во времени появляется возможность анализа состояния всех объектов на любом разрезе сети;
2) возможность создания сетей любой сложности и размерности, как функции от времени и количества полюсов сети, представляющих собой ЕП;
3) возможность моделирования на уже созданной сети в пределах любых интервалов времени, с различных, интересующих проектанта событий;
4) возможность оценки расписаний работы ГПС;
5) максимальная приближенность логики синтеза сетей к логике построения программного обеспечения;
6) возможность использования модульной структуры программного обеспечения процесса моделирования.
Последовательность взаимодействия элементов: