Контрольная работа: Розрахунок рами методом переміщень
Вибір шифру та розрахункової схеми за номером залікової книжки 01058
Перша цифра шифру – це цифра 4 – остання із суми усіх цифр залікової книжки: 0+1+0+5+8=14.
Друга цифра шифру – це цифра 4 – остання із суми усіх цифр залікової книжки без урахування першої: 1+0+5+8=14.
Третя цифра шифру – це цифра 8 – визначається як остання з усіх цифр номера залікової книжки.
Остаточно шифр варіанта – 448.
Номер розрахункової схеми визначається двома останніми цифрами номера залікової книжки, від яких треба відняти 48: 58-48=10. Отже, номер розрахункової схеми – 10.
Вихідні дані: l = 12 м;h = 10 м; ![]() = 1,6;
= 1,6;
q2 = 12 кН/м; F2 = 60 кН; F4 = 20 кН.
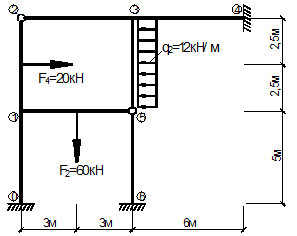
Мал. 1 - Розрахункова схема
Введемо позначення ![]() – погонна жорсткість стержня:
– погонна жорсткість стержня:
![]() ;
; ![]() .
.
1. Кінематичний аналіз заданої системи та визначення кількості невідомих методу переміщень
Визначимо ступінь свободи системи
![]() ,
,
де Д – кількість дисків;
Ш – кількість простих шарнірів;
В0 – кількість опорних в’язей.
Ступінь статичної невизначеності системи ![]() .
.
Отже, дана рама є 6 раз статично невизначною і може бути геометрично незмінна.
Аналіз геометричної структури заданої рами
Рама складається із трьох дисків, кожен із яких опираються на нерухому основу за допомогою затиснення, тому система є геометрично незмінною.
Визначення ступеня кінематичної невизначеності
Ступінь кінематичної невизначності системи визначається кутовими (n в ) та лінійними незалежними переміщеннями вузлів системи (n л ). Кількість кутів повороту дорівнює кількості жорстких вузлів системи, а кількість лінійних незалежних переміщень – кількості ступенів свободи умовної шарнірно-стрижньової системи, яка утворюється шляхом розташування шарнірів у всіх жорстких вузлах заданої системи, включаючи й опорні затиснення. Таким чином, ступінь кінематичної невизначеності системи (n ) дорівнює
п = пв + пл =2+1 = 3.
Система тричі кінематично невизначна.
За основні невідомі методу переміщень приймаємо кутові переміщення жорстких вузлів і лінійні переміщення вузлів заданої системи, які позначимо Z1 , Z2 iZ3 – кількість невідомих дорівнює ступеню її кінематичної невизначеності:

2. Вибір основної системи методу переміщень
--> ЧИТАТЬ ПОЛНОСТЬЮ <--