Курсовая работа: Автоматическая система регулирования температуры
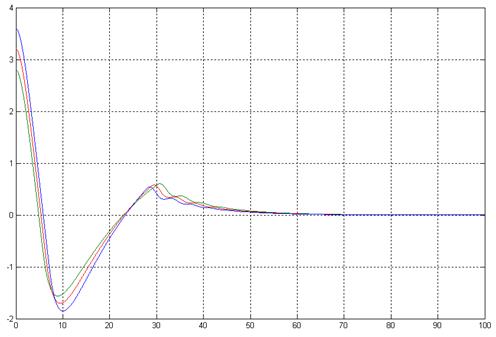
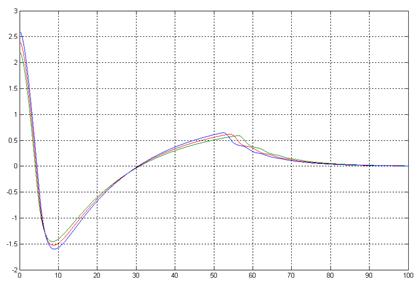
Переходные процессы для ошибки (-10%,-20%,-30%)
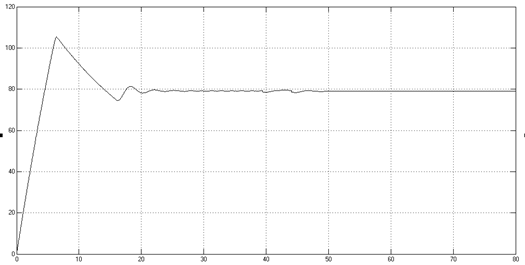
Uз=2В
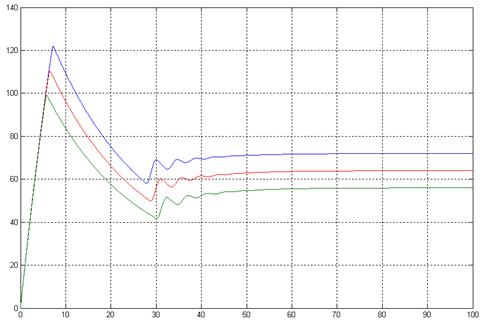
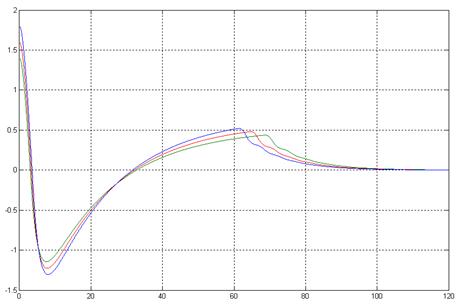
Переходные процессы для выходной переменной (+10%,+20%,+30%)
Переходные процессы для ошибки (+10%,+20%,+30%)
Переходные процессы для выходной переменной (-10%,-20%,-30%)
Переходные процессы для ошибки (-10%,-20%,-30%)
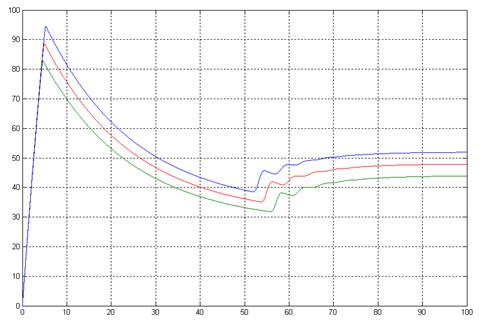
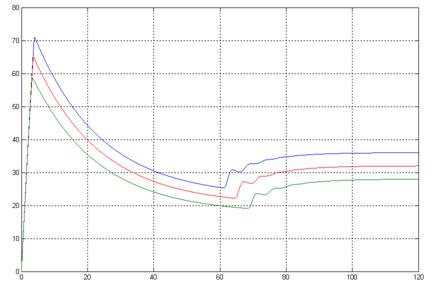
4.3 Статические характеристики системы
Зависимости выходной переменной от возмущающего воздействия при трех значениях задающего воздействия:
Uз=2В Uз=4В
Uз=6В
4.5 Сравнение результатов моделирования с помощью составленной программы и с помощью типовых программных средств
При сравнении переходных процессов по ошибке и возмущающему воздействию, а также статических характеристик системы, полученных с помощью написанной программы и имитационной среды Simulink, можно сделать вывод, очевидно, что графики практически полностью совпадают. Небольшие различия обусловлены лишь различным шагом расчетов.
5. ДОПОЛНИТЕЛЬНОЕ ИССЛЕДОВАНИЕ СИСТЕМЫ
5.1 Влияние напряжения питающей сети на процессы регулирования температуры
Рассмотрим переходные процессы при одном и том же напряжении задания 4В и температуре окружающей среды 25С:
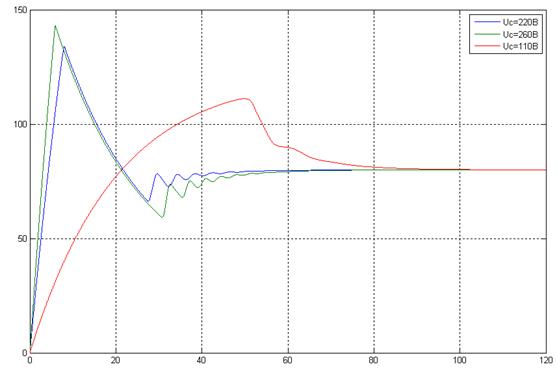
Как видно по переходному процессу, при увеличении напряжения питающей сети увеличивается перерегулирование, инерционность увеличивается незначительно. При уменьшении напряжения питания в 2 раза (например, отказ одного тиристора) перерегулирование резко снижается, но сильно увеличивается время регулирования.
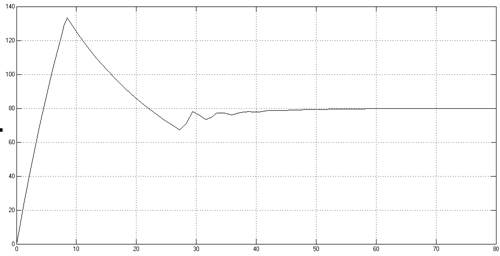
5.2 Изменение свойств системы при использовании вместо ПИ регулятора П-, ПД- и ПИД-регулятора
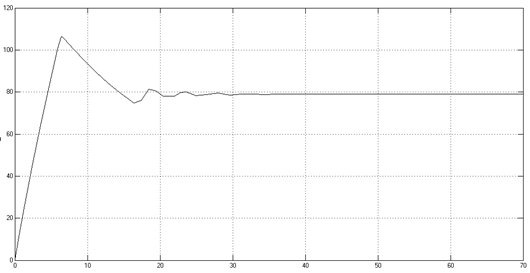
ПИ-регуляор(исходный):
ПД-регулятор ( Kp =20.39, Kd =2):
Применение ПД-регулятора позволило уменьшить величину перерегулирования и значительно сократить время регулирования, однако появилась установившаяся ошибка, для данного задания равная 1ºС.
П-регулятор (Кр=20.39):