Курсовая работа: Автоматизация изготовления детали
Такт обработки = 480/30 = 16 (шт/смена).
Таким образом, длинна лотка:
L= 16·96 = 1536 (мм);
Принимаем длину лотка L=1550 (мм).
3.3 Расчёт ЗУ промышленного робота
Захватные устройства роботов осуществляют следующие функции: удерживают объект манипулирования во время его транспортировки; ориентирует объект манипулирования; базируют положение объекта манипулирования относительно системы координат манипулятора рабочей зоны оборудования.
В роботах широкое распространение получили захватные устройства (ЗУ) специального назначения, с помощью которых производят захват сравнительно небольшой номенклатуры объектов манипулирования.
Однако у современных роботов имеются устройства смены ЗУ в автоматическом режиме, что обеспечивает работу с достаточно разнообразными объектами манипулирования при относительной простоте и рациональной стоимости конструкции.
ЗУ удерживают объект манипулирования с помощью сил трения, возникающих при воздействии его элементов на объект манипулирования, фиксации объекта манипулирования по имеющимся на нем выступам, отверстиям, штифтам, пазам и другим поверхностям, которые могут быть использованы в качестве баз, а также электромагнитных сил и вакуума.
В большинстве случаев, для уменьшения усилий привода схватов применяют комбинацию кинематического, электромагнитного и вакуумного воздействия с одновременным использованием для фиксации базовых поверхностей объекта манипулирования.
Определение усилия захвата.
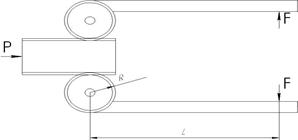
Рис.3. - конструктивная схема механического ЗУ.
Усилие захватывания определяют:
![]()
![]()
где m = 44 (кг) - масса объекта манипулирования;
a - максимальное ускорение центра масс объекта манипулирования, м/с2 ( а=2...3 g );
K1 - коэффициент, зависящий от положения заготовки по отношению к губкам ЗУ и направления действия силы тяжести; выбирают по табл.; К1 = ½;
K2 =1,3...2,0 - коэффициент запаса; большие значения K2 берут для захватных устройств, в которых отсутствует самоторможение.
Усилие привода определяют из условия равенства элементарных работ, совершаемых приводом и губками ЗУ (рис.2.1).
![]() ,
,
Откуда
![]() ;
;
Величину![]() называют передаточным отношением ЗУ. Его определяют исходя из кинематического анализа ЗУ:
называют передаточным отношением ЗУ. Его определяют исходя из кинематического анализа ЗУ:
![]() ;
;
Радиус зубчатого колеса определяется из расчета зубчато - реечной передачи на изгиб:
![]() ,
,
где z =17 - число зубьев;
![]() =4,26 - коэффициент формы зуба;
=4,26 - коэффициент формы зуба;