Курсовая работа: Автоматизация линии раздачи кормов в свинарнике
Вывод : Алгоритм реализуем, так как суммарное весовое состояние равно нулю. Схем управления реализуема без дополнительных элементов, так как в тактах алгоритма включения нет повторяющихся весовых состояний.
5. Разработка структуры управления в автоматическом режиме работы оборудования
Разработку начинаем с составления структурной формулы. Для этого воспользуемся таблицами частных включений исполнительных механизмов. В нее входят: само исполнительное устройство, контакты командного аппарата, включающего исполнительный механизм, и контакты аппаратов, срабатывающих и обеспечивающих выполнение всех условий, предъявляемых к данной технологической линии.
Структурная схема исполнительного элемента Х1 ![]()
Таблиц 5.1 – Таблица частных включений ИЭ Х1
| Э | Вес Э | Такты | ||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |||
| x1 | 1 | - | - | - | - | + | + | + | + | + | + | - | - | |
| b1 | 2 | + | + | + | + | + | - | - | - | - | - | - | - | |
| b2 | 4 | - | + | + | + | + | + | - | - | - | - | - | - | |
| b3 | 8 | - | - | + | + | + | + | + | - | - | - | - | - | |
| z’c | 16 | - | - | - | + | + | + | + | + | - | - | - | - | |
| b4 | 32 | - | - | - | - | - | - | - | - | - | + | + | - | |
| Весовое состояние | 2 | 6 | 14 | 30 | 31 | 29 | 25 | 17 | 1 | 33 | 32 | 0 | ||
Из анализа весового состояния видно, что схему можно реализовать без дополнительных элементов.
Из структурной теории релейных устройств известна следующая структурная формула для определения первоначальной структуры элемента Х:
![]() ,
,
где fср (х) − логическое произведение контактов элементов в такте отпускания, обеспечивающих замкнутую цепь элемента, для которого определяется структурная формула(контакт элемента в fср не входит).
fотп (х) − логическое произведение контактов элементов в такте отпускания, обеспечивающих замкнутую цепь элемента, для которого определяется структурная формула (контакт элемента в fотп не входит).
![]() .
.
Используя закон де Моргана преобразуем полученное выражение.
![]() .
.
Для упрощения первоначальных структурных формул элемента можно воспользоваться таблицей покрытий. Она позволяет исключить из первоначальной структурной формулы лишние слагаемые, которые либо не реализуют какие-либо такты или реализуют их с помощью дополнительных слагаемых структурной формулы.
Таблица 5.2 – Таблица покрытий ИЭ Х1
| № | Цепь | Такты | |||||
| 4 | 5 | 6 | 7 | 8 | 9 | ||
| 1 | X | X | – | – | – | – | |
| 2 | – | X | – | – | – | – | |
| 3 | – | X | X | X | – | – | |
| 4 | – | X | X | X | – | – | |
| 5 | – | X | X | X | X | – | |
| 6 | – | X | X | X | X | X | |
![]() .
.

Рисунок 5.1 – Структурная схема управления ИЭ Х1
Проводим аналогичные операции и расчеты для остальных элементов. Структурные формулы и схемы включения для этих элементов сведем в таблицу 5.3.
Таблица 5.3 - Структурные формулы и схемы включения
| Элемент | Структурная формула | Схема включения |
| X2 |  | |
| X3 |  | |
| X4 |  | |
| X5 |  | |
| X6 |  | |
| X7 | 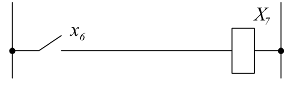 | |
| X8 | 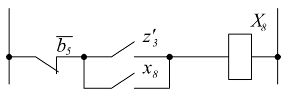 | |
| Z2 | 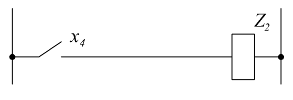 | |
| Z3 | 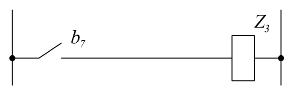 |
На основании полученных частных структурных схем всех элементов составим полную структурную схему управления технологическим процессом. При ее составлении произведем минимизацию схемы управления.
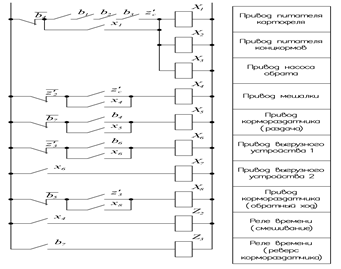
Рисунок 5.2 – Полная структурная схема управления технологическим процессом
Так как управление технологической линией осуществляется контроллером, произведем разработку программы управления.
Приведем пример представления принципиальной схемы ИЭ, выраженной во включении X1 , X2 , X3.
Составим таблицу входов выходов для программы управления элементами X1 , X2 , X3. :
Таблица 5.4 – Таблица входов выходов для программы управления элементом X1 , X2 , X3.
| вход | сигнал | выход | сигнал |
| I 01 | Датчик уровня b3 | O 01 | K1(привод питателя картофеля) |
| I 02 | Датчик уровня b1 | O 02 | K2(привод питателя концкормов) |
| I 03 | Датчик уровня b2 | O 03 | K3(привод насоса обрата) |
| I 04 | Датчик уровня b4 |
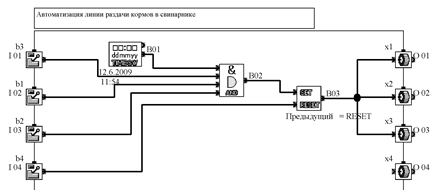
Рисунок 5.4 – Пример программы реализуемой на контроллере