Курсовая работа: Автоматизация сушильно-промывной линии ЛПС-120
1,212
1,224
1,231
1,238
1,246
1,257
1,268
1,275
1,284
1,293
Точность аппроксимации объекта передаточной функцией (2.1.7) оценивается по формуле [3].
|
|
(2.1.12) |
где ![]() - значения кривых разгона экспериментальной и аппроксимированной.
- значения кривых разгона экспериментальной и аппроксимированной.
|
|
Точность аппроксимации удовлетворяет требованиям инженерных расчетов.
3.2. Выбор типа регулятора давления и определение его параметров
По номограмме рис.5 [3] выбираем ПИ-регулятор.
Оптимальные параметры настройки ПИ-регулятора рассчитываются по частотным характеристикам [3].
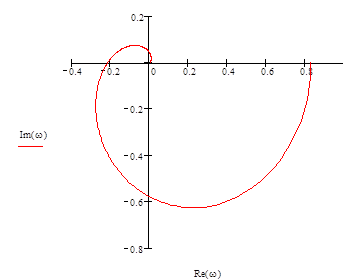 |
???????? ???? ??????? ?????????? (???.2.2.1)
Рис. 3.2.1. АФЧХ объекта управления.
По АФЧХ объекта управления строится АФЧХ разомкнутой системы для ![]() и нескольких (любых) значений
и нескольких (любых) значений ![]() , удобных для построения характеристик
, удобных для построения характеристик
|
|
2.2.1 |
При этом каждый вектор АФЧХ объекта управления следует повернуть на 90º по часовой стрелке и уменьшить в ![]() раз. Затем из начала координат проводится прямая линия под углом β к вещественной отрицательной полуоси и строятся окружности с центром на этой оси, касающиеся АФЧХ и этой прямой (рис.2.2.2).
раз. Затем из начала координат проводится прямая линия под углом β к вещественной отрицательной полуоси и строятся окружности с центром на этой оси, касающиеся АФЧХ и этой прямой (рис.2.2.2).
|
|
(2.2.2) |
Показатель колебательности М выбирается равным 1.6.
Предельное значение коэффициента передачи регулятора для каждого значения времени изодрома определяется по формуле [3]
|
|
(2.2.3) |