Курсовая работа: Элементы системы управления сварочным манипулятором интегрированной системы
Основными нелинейностями манипулятора являются – ограничитель напряжения на выходе регулятора скорости, нелинейности преобразования сигнала в электроприводе с ЧТУ и механические люфты и ограничения механизмов перемещения платформы. Однако, если работу АСУ электроприводом рассматривать раздельно в режиме переноса инструмента (нелинейный режим с ограничением) и в режиме слежения за технологическим процессом (линейный режим) и пренебречь малыми, к тому же сглаживаемыми, нелинейностями преобразования сигналов в электроприводе, а также пренебречь малыми механическими нелинейностями (механическая часть тщательно обрабатывается и не включена в обратную связь контура управления), то каждый режим отдельно, в первом приближении можно считать линейным.
Данные предположения использованы при дальнейших расчётах.
Передаточная функция силовой части электропривода имеет вид:
 ,(2.3)
,(2.3)
где ![]() – коэффициент усиления привода с ЧТУ;
– коэффициент усиления привода с ЧТУ; ![]() – постоянная времени силовой цепи ИТ-АД, с.
– постоянная времени силовой цепи ИТ-АД, с.
 ,(2.4)
,(2.4)
где ![]() – статический коэффициент передачи привода,
– статический коэффициент передачи привода, ![]() ;
; ![]() – масштабный коэффициент преобразования скорости поворота ротора АД в напряжение,
– масштабный коэффициент преобразования скорости поворота ротора АД в напряжение, ![]() ;
; ![]() – коэффициент, учитывающий увеличение момента инерции системы за счет нагрузки, приведенной к валу АД;
– коэффициент, учитывающий увеличение момента инерции системы за счет нагрузки, приведенной к валу АД; ![]() – момент инерции АД,
– момент инерции АД, ![]() .
.
 (2.5)
(2.5)
![]()
 (2.6)
(2.6)
 .
.
Следовательно,
 (2.7)
(2.7)
Подставив рассчитанные параметры в (2.3), получим:
 .
.
2.4 Структурная схема манипулятора в режиме переноса инструмента
Данный режим работы манипулятора является нелинейным. Этот режим используется для быстрого переноса технологического инструмента (сварочного электрода) из исходной зоны – в рабочую. Структурная схема контура скорости для режима переноса инструмента показана на рис. 2.1.
В этом режиме ограничитель на выходе ПИ (пропорционально-интегрального) регулятора скорости входит в режим ограничения и тем самым размыкает обратную связь по скорости и остается только характерная для частотно-токового управления обратная связь через задатчик тока и контур тока.
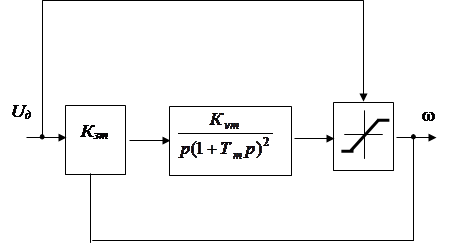
Рисунок 2.1 – Структурная схема контура скорости в режиме переноса инструмента
Амплитуда тока статора в этом режиме формируется задатчиком тока пропорционально ![]() , а частота изменения тока равна:
, а частота изменения тока равна:
![]() ,(2.8)
,(2.8)
где ![]() – частота вращения робота двигателя;
– частота вращения робота двигателя; ![]() – частота скольжения, что обеспечивает в установившемся режиме заданный момент и скорость вращения ротора.
– частота скольжения, что обеспечивает в установившемся режиме заданный момент и скорость вращения ротора.
Передаточная функция для этого режима:
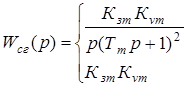
 (2.9)
(2.9)
где ![]() – заданная угловая скорость двигателя, пропорциональная
– заданная угловая скорость двигателя, пропорциональная ![]() .
.
Рассмотрим контур положения (КП), структурная схема которого в режиме переноса инструмента показана на рис. 2.2, где приняты следующие обозначения:
![]() – заданная скорость переноса инструмента,
– заданная скорость переноса инструмента, ![]() ;
;
![]() – заданное положение переноса;
– заданное положение переноса;