Курсовая работа: Элементы системы управления сварочным манипулятором интегрированной системы
ЭС – элемент сравнения.
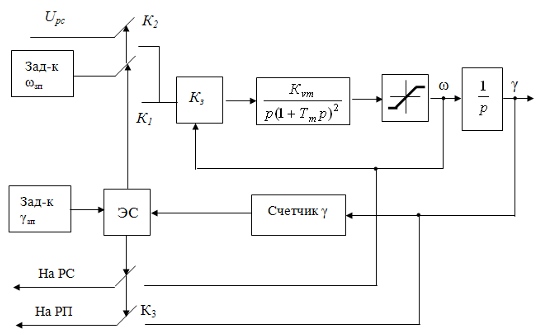
Рисунок 2.2 – Структурная схема КП в режиме переноса инструмента
В режиме переноса на привод подается сигнал номинальной скорости переноса ![]() и конечное положение режима по грубой шкале (с точностью до 0,5 оборотов вала двигателя) –
и конечное положение режима по грубой шкале (с точностью до 0,5 оборотов вала двигателя) – ![]() . Контур положения в этом режиме замкнут через счетчик оборотов. Сигнал со счетчика оборотов (
. Контур положения в этом режиме замкнут через счетчик оборотов. Сигнал со счетчика оборотов (![]() ) сравнивается с сигналом
) сравнивается с сигналом ![]() и при их совпадении режим переноса через ключ
и при их совпадении режим переноса через ключ ![]() отключается и через ключи
отключается и через ключи ![]() и
и ![]() с заданной задержкой включается режим слежения.
с заданной задержкой включается режим слежения.
Передаточная функция в режиме переноса инструмента по положению равна:
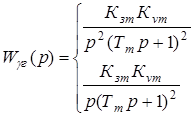
 (2.10)
(2.10)
Подставив численные значения в (2.9) и (2.10) получим:
При ![]()
 .
.
При ![]()
![]() .
.
При ![]()
 .
.
При ![]()
 .
.
Составим структурную схему механической части манипулятора по одной координате.
Механическая часть между валом двигателя и последующей подвижной платформой или инструментом имеет упругие связи и люфты, что приводит к механическим колебаниям инструмента при набросе (или снятии) скачка нагрузки. Не вдаваясь детально во все причины возникновения этих колебаний, в соответствии с [11], [44], [45] и др., в первом приближении, примем, что механические колебания по каждой координате описываются дифференциальным уравнением 2-го порядка.
Для дальнейших расчетов примем [7], [34]: ![]() ;
; ![]() .
.
 |
Рисунок 2.3 – Структурная схема механической части манипулятора по одной координате
2.5 Моделирование АСУ манипулятором по одной координате
Уравнения состояния в векторно-матричной форме записи имеют следующий вид:
![]() , (2.11)
, (2.11)
где ![]() – матрица состояния (динамическая);
– матрица состояния (динамическая); ![]() – матрица управляющих воздействий (матрица входа).
– матрица управляющих воздействий (матрица входа).
Для определения элементов матрицы ![]() и
и ![]() составим схемы моделирования, в соответствии с алгоритмической схемой (рис. 2.2).
составим схемы моделирования, в соответствии с алгоритмической схемой (рис. 2.2).
Рассмотрим контур скорости.
Режим разгона при переносе инструмента ![]() иллюстрируется схемой модели на рис. 2.4.
иллюстрируется схемой модели на рис. 2.4.

Рисунок 2.4 – Схема моделирования скорости в режиме переноса инструмента
Дифференциальные уравнения в режиме переноса инструмента примут вид: