Курсовая работа: Исследование работы системы автоматического управления двигателем постоянного тока с независимым
3) Взаимная индуктивность обмоток якоря и возбуждения (Laf).
4) Момент инерции (J).
5) Коэффициент вязкого трения (Bm).
6) Момент сухого трения (Tf).
7) Начальная скорость (Initial speed).

Рисунок 14 – Окно настройки параметров двигателя постоянного тока
Результат работы электрической модели нашей системы автоматического управления двигателем постоянного тока независимого возбуждения показан на рисунках 15 – 17. Момент нагрузки двигателя постоянен и не изменяется во время работы схемы.

Рисунок 15 – Временная зависимость заданной и текущей скорости вращения w(t).
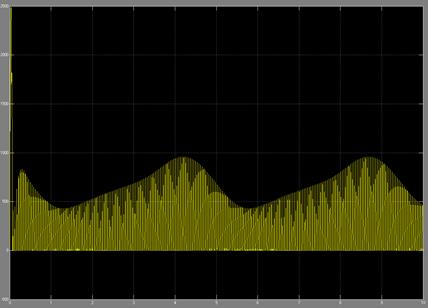
Рисунок 16 – Временная зависимость Ia(t)
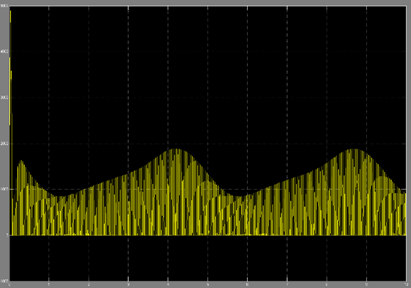
Рисунок 17 – Временная зависимость Мдв(t)
После исследования электрической схемы по полученным графикам, можно сказать, что она соответствует заданным требованиям. Электрическая схема обеспечивает изменение скорости вращения двигателя постоянного тока по закону ![]() при постоянном моменте нагрузки на валу двигателя
при постоянном моменте нагрузки на валу двигателя ![]() . В отличие от структурной схемы, где характеристики выглядят идеально, в электрической схеме наблюдается небольшое колебание сигналов относительно заданных значений. Это может быть связано с возможными погрешностями электрических элементов схемы.
. В отличие от структурной схемы, где характеристики выглядят идеально, в электрической схеме наблюдается небольшое колебание сигналов относительно заданных значений. Это может быть связано с возможными погрешностями электрических элементов схемы.
5 . ЗАКЛЮЧЕНИЕ
В данной курсовой работе было проведено исследование работы системы автоматического управления двигателем постоянного тока с независимым возбуждением с ПИ-регулятором. В ходе работы было выполнено моделирование системы управления в среде Matlab 6.1. С помощью пакета Nonlinear Control Design (NCD) были подобраны параметры регуляторов структурной схемы в соответствии с предъявляемыми требованиями, а с помощью пакета Power System Blockset была исследована электрическая схема системы.
В процессе исследования работы двух схем были выделены все основные особенности и различия этих двух типов схем, а также показаны основные временные характеристики двигателя постоянного тока с независимым возбуждением.