Курсовая работа: Колонна для перегона коньячного спирта
На рисунке 2 представлена блок – схема модели колонны.
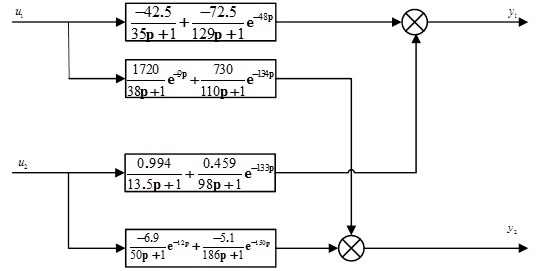
Рисунок 2 – Блок-схема модели колонны
В исходных данных, модель дана как мы видим в виде матриц передаточных фунцый. Для преобразования передаточных функций в пространство состояний использовали соотношения. Наиболее простой аппроксимацией опоздания является замена его инерционным звеном первого порядка. Для проверки правильности преобразования следует найти собственные значения системы с помощью функции Eig и убедиться, что или все собственные значения имеют отрицательные действительные части (система постоянна), или число нулевых собственных значений совпадает с числом интегральных звеньев в исходной модели. Окончательно система должна быть представлена матрицами A,B,C,D.
| |
| |
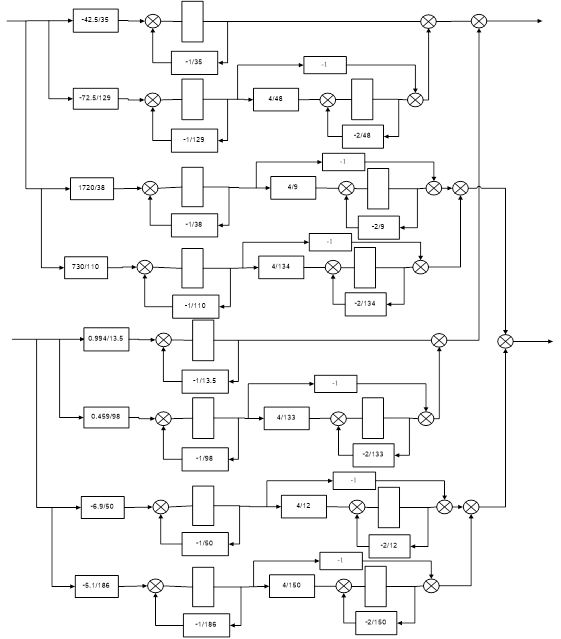
Рисунок 3. Развернутая структурная схема системы с учетом запаздывания
Исходя из систем получим матрицы модели в пространстве состояний
![]()
где х- состояние систем;
y- измеряемые входы;
f- возмущение;
u- управление.
Матрицы системы имеют вид:
A=[-1/35 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 -1/129 0 0 0 0 0 0 0 0 0 0 0 0;
0 4/48 -2/48 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 -1/38 0 0 0 0 0 0 0 0 0 0;
0 0 0 4/9 -2/9 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 -1/110 0 0 0 0 0 0 0 0;
0 0 0 0 0 4/134 -2/134 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 -1/13.5 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 -1/98 0 0 0 0 0;
0 0 0 0 0 0 0 0 4/133 -2/133 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 -1/50 0 0 0;
0 0 0 0 0 0 0 0 0 0 4/12 -2/12 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 -1/186 0;
0 0 0 0 0 0 0 0 0 0 0 0 4/150 -2/150];
Матрица входа:
B=[-42.5/35 0;