Курсовая работа: Колонна для перегона коньячного спирта
1.9628 0
2.9803 0
0.0200 0
0 0.0326
0 0.0021
0 0.0000
0 -0.0618
0 -0.0045
0 -0.0123
0 -0.0001
Построим разгонные характеристики с помощью функций dstep, subplot, plot, grid.
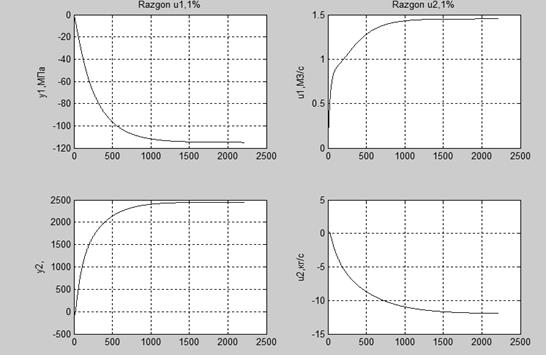
Рисунок 4.Кривые разгона.
В результате анализа кривых разгона можно сделать вывод, что значения полученные на выходе каналов регулирования описанных инерционными звеньями 1-го порядка совпадают со значением коэффициента К инерционного звена, а на выходе каналов регулирования представленных интегрирующим звеном, кривые разгона направлены в отрицательную сторону, если имеют знак «-» в передаточной функции звена и наоборот. Если сравнить матрицу передаточных функций и полученные разгонные характеристики, видно, что Кр совпадают, можно сделать вывод: построение модели и преобразование выполнены верно.
4 Синтез многомерного ПИ-регулятора
Для синтеза ПИ-регулятора полученные матрицы должны быть расширены в матрицы A1, B1, C1:
A1=[Ad zeros(n,l); C eye(l)];
B1=[Bd;zeros(m)];
C1=[C eye(l)];
Матрицы параметров регулятора должны быть расчитаны с помощью функции dlqr.
K=dlqr(A1,B1,Q,R)
L=dlqr(A1',C1',Q1,R1)'
Весовые матрицы Q1,R1,Q,R выбраны как единичные (для простоты матрицы генерирует функция eye).
Матрицы имеют вид:
A1 =
Columns 1 through 8
0.9872 0 0 0 0 0 0 0
0 0.9965 0 0 0 0 0 0
0 0.0371 0.9814 0 0 0 0 0