Курсовая работа: Конструирование алгоритмов управления на основе нечеткой логики и нейронных сетей
If (level is okay) and (rate is negative), then (valve is close slow)
Здесь мы к прошлым трем добавляем еще два правила, которые учитывают знак производной, чтобы на «нормальном» уровне плавно отслеживать тенденции изменения уровня жидкости.
К тому же исследования проведены при модификации первого правила в виде:
If (level is okay) and (rate is null) then (valve is no change)
Такая замена дает небольшой выигрыш во времени моделирования, что можно видеть на нижеследующих графиках.
Теперь нечеткий регулятор имеет две входные переменные, одна остается для уровня жидкости, другая для знака производной. Схема системы представлена на рисунке 2.13.
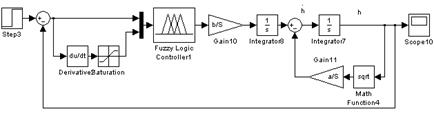
Рисунок 2.13 – Схема ОУ с нечетким регулятором (5 правил).
В ходе моделирования были получены следующие графики изменения уровня жидкости в баке:
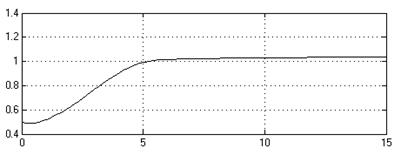
Рисунок 2.14 – Изменение уровня жидкости в емкости в системе с нечетким регулятором (5 правил), начальный уровень – 0.5, при исходных правилах.
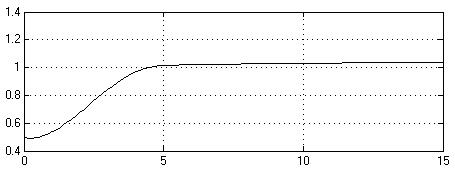
Рисунок 2.15 – Изменение уровня жидкости в емкости в системе с нечетким регулятором (5 правил), начальный уровень – 0.5.
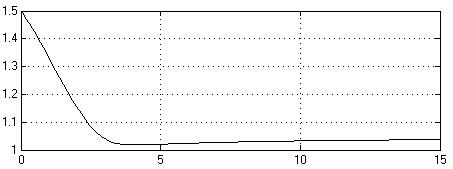
Рисунок 2.16 – Изменение уровня жидкости в емкости в системе с нечетким регулятором (5 правил), начальный уровень – 1.5.
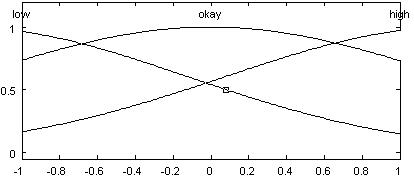
Рисунок 2.17 – Функции принадлежности для термов входной переменной level.
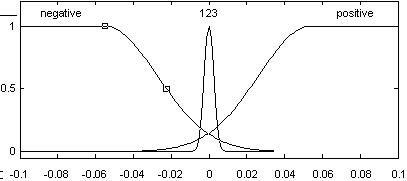
Рисунок 2.18 – Функции принадлежности для термов входной переменной rate.
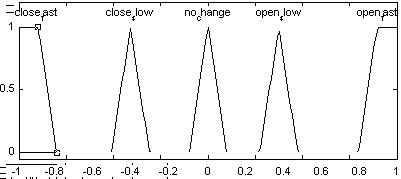
Рисунок 2. 19 – Функции принадлежности для термов выходной переменной «клапан»-valve.
Как мы можем видеть, мы добавляем еще два терма для выходной переменной, соответствующие меньшей скорости открывания (закрывания) клапана. Функции принадлежности для входной переменной уровня жидкости были существенно изменены по сравнению с аналогичными в регуляторе для 3 правил.
Соответствующим подбором типов и форм функций принадлежности удалось добиться как нормального качества процессов без значительного перерегулирования, так и приемлемой точности.
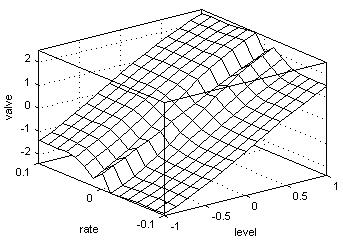
Рисунок 2.20 – Поверхность отклика для нечеткого регулятора (5 правил).
3. копирование пд – регулятора
Также была поставлена и решена задача синтеза нечеткого регулятора, копирующего построенный выше ПД-регулятор. Схема с регулятором – копией изображена на рисунке 3.1.
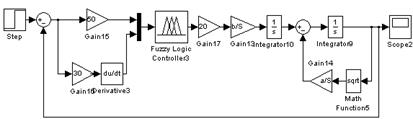
Рисунок 3.1. – схема включения нечеткого регулятора –копии.
База нечетких правил, нечеткие переменные и их термы были заданы в режиме командной строки, текст приводится ниже.