Курсовая работа: Конструирование алгоритмов управления на основе нечеткой логики и нейронных сетей
70141111
80161111
90181111
100211111
0111111
0231111
0351111
0471111
0591111
06121111
07141111
08161111
09181111
010211111] ;
a=addrule(a,ruleList);
writefis(a,'sw_f');
Графики процессов для ПД регулятора и его нечеткой копии приведены на рисунке 3.2.
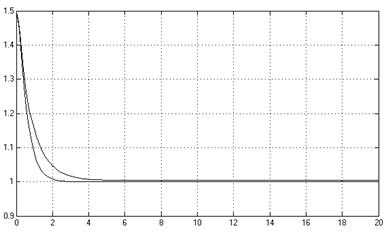
Рисунок 3.2. –– Графики изменения уровня жидкости в баке при ![]() =1 и
=1 и ![]() =1.5. для ПД регулятора и его копии.
=1.5. для ПД регулятора и его копии.
Итак, путем нормирования и задания базы 20 правил удалось достичь довольно близкого приближения к оригиналу как по качеству, так и по точности. Экспериментальные и сравнительные исследования будут проведены в следующем разделе.
4. исследование и сравнительный анализ качества з.с.
4.1. Оценить качество замкнутой системы при различных начальных  и задающих уровнях
и задающих уровнях  жидкости в баке
жидкости в баке
Здесь и далее приняты следующие обозначения
1 - ПД-пегулятор;
2 – Нечеткий регулятор для 5 правил;
3 – Нечеткий регулятор - копия;
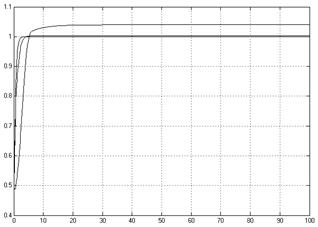
Рисунок 4.1. – Графики изменения уровня жидкости в баке при ![]() =1 и
=1 и ![]() =0.5.
=0.5.
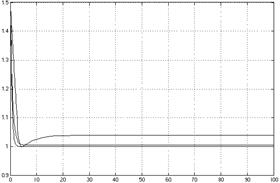
Рисунок 4.2. – Графики изменения уровня жидкости в баке при ![]() =0.3 и
=0.3 и ![]() =1.5.
=1.5.
4.2. Оценить влияние неточности от 1 до 5% при измерении датчиком уровня воды в емкости, введя в систему случайный шум
Интенсивность шума определяем по правилу трех сигм ![]()