Курсовая работа: Механические вибраторы строительных и дорожных машин
| Q1 =Pmin | Q2 | Q3 | Q4 | Q5 = Pmax |
| 800 | 1600 | 2400 | 3200 | 4000 |
Q= F1 +F2 *cosα; ![]() , где F1 =F2 =2400 Н
, где F1 =F2 =2400 Н
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
3 Схемно–конструктивный анализ вибровозбудителей бегункового (поводкового) одночастотного и поличастотного вибратора
В дебалансных вибраторах центробежная сила дебалансов полностью передается на подшипники вала вибратора. С целью разгрузки подшипников предложена, конструкция бегункового вибратора (рис. 3). Здесь дебаланс 1, выполненный в виде цилиндрического ролика радиусом r, катится по внутренней поверхности беговой дорожки 2. Движение к ролику от водила 3 передается через специальный поводок 4. Центробежная сила P1 , возникающая при вращении водила, передается непосредственно на корпус виброэлемента. Подшипники ролика нагружены только тем усилием, которое необходимо для преодоления сопротивления перекатыванию его по беговой дорожке.
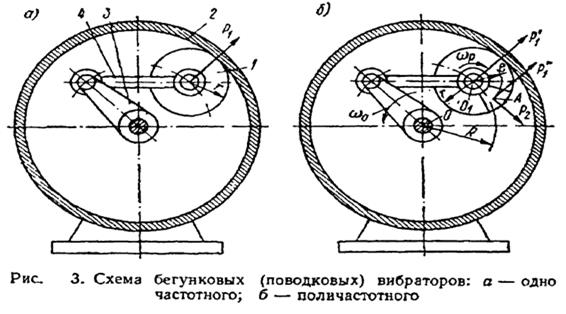 |
? ?????? ?????????? ??????????? ??????? (???. 3, ?) ????????? ??? ???????????? ???? ????????? ???????. ???? ???????????? ???? ??????????? ?????????? ???????? ?. ?. ?????? ???????????? ??? ? , ? ?????? - ????? ???????? ?????? ???????????? ????? ??? ?1 . ????????, ?????? ? ???? ?????? ????? ??????????? ????????? ?? ??????????????? ?????? ? ??????? ?????? ? ????????????? ???????????? ????? ??????.
При поступательном движении центробежная сила изменяется с частотой вращения водила w0 , (рис. 3, б). Ее амплитудное значение определяется из выражения
P1 =P1 ¢ +P1 ¢¢ =(M+m)Rw0 2
где P¢ 1 - составляющая центробежной силы от массы М, сосредоточенной в точке O1 , Н ; р¢¢ 1 - составляющая центробежной силы от массы m приложенной в ц.т. дебаланса (в точке А), Н; М - масса уравновешенной части ролика, кг; m масса дебаланса ролика, кг; R - радиус вращения центра ролика, м.
Вторая сила, изменяющаяся с частотой wр , возникает вследствие вращения неуравновешенного ролика вокруг своей оси:
P2 =m∙e∙wp 2
где е - эксцентриситет дебалансной части ролика, м; wр - угловая скорость вращения ролика, c-1 :
wр =R / r ∙w0
При установке нескольких дебалансных роликов различного диаметра результативная возмущающая сила равна геометрической сумме составляющих возмущающих сил. Большое значение при этом имеют начальные углы установки дебалансных роликов.
В существующих конструкциях поличастотных бегунковых (поводковых) вибраторов дебалансные ролики свободно перекатываются по беговой дорожке только за счет сил трения. Уменьшение сил трения при вибрации, чему способствует наличие масла в корпусе вибратора, силы инерции при пуске, а также противодействующий момент дебалансной части создают условия для проскальзывания ролика относительно беговой дорожки. Это вызывает уменьшение частоты вращения ролика и в некоторых случаях его остановку. Наличие скольжения изменяет характер результативной возмущающей силы, делает ее переменной и не позволяет иметь стабильный режим вибрации. Параметры бегунковых поличастотных вибраторов необходимо выбирать, с учетом отсутствия отрыва и скольжения ролика. При заданных параметрах необходимо создавать условия, при которых коэффициент трения ролика по беговой дорожке корпуса вибратора будет больше минимального.
Литература
1. Механические вибраторы строительных и дорожных машин.Под редакцией В.П. Шардина.
2. Курсовое проектирование деталей машин.Под редакцией А.Е. Шейнблита.