Курсовая работа: Механизм поворота руки промышленного робота (модуль М4)
5. Расчёт подшипников
По динамической грузоподъемности подбирают подшипники качения при п=> 10 мин. - Ä1 Подшипник подбирается по условию: Сп <=Ср , где Сп - потребная динамическая грузоподъемность, Ср - располагаемая динамическая грузоподъемность.
Динамическую грузоподъемность определяют по формуле:
![]()
где а1 = 0.44, а23 =1 - коэффициенты, учитывающие качество материалов подшипника, смазку и условия эксплуатации:
![]()
промышленный робот модуль
Эквивалентную нагрузку F для различных типов подшипников определяют по формуле:
в частности для радиальных.
F=VÄFa ÄKd ÄKT
V = 1 (вращается внутреннее кольцо); Kd Ä = 1 (спокойная нагрузка);
KT = 1 (температурный коэффициент).
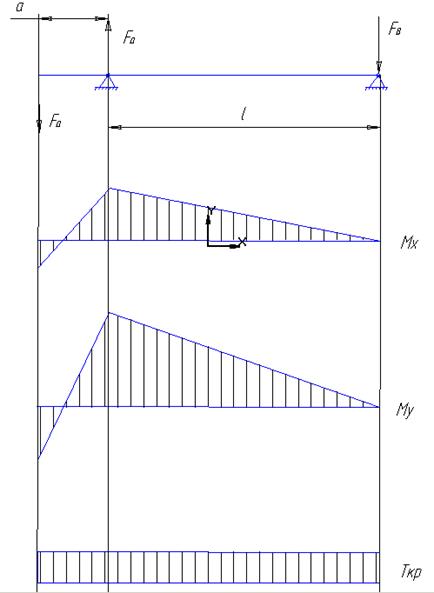
Fr = 31.62Н
FВ = (Fr Ä50) /700= 2.26Н
FА = Fr +FВ => FА = 34Н
F = 1Ä34Ä1Ä1 = 34Н
![]()
Находим
Выбираем стандартный подшипник
№1000905
Внутренний диаметр d = 20мм;
Внешний диаметр D = 37мм;
Ширина В = 9мм;
Радиус округления r = 0,5мм;
Грузоподъемность С = 574Н;
Статическая грузоподъемность С = 375Н;
Шарики DT = 5мм;
Число шариков Z = 12шт;