Курсовая работа: Моделирование ПИД-регулятора и преобразователя давления в частоту в пакете LabVIEW

б. Метод Ньютона

в. Кубическими сплайнами
г. Метод наименьших квадратов

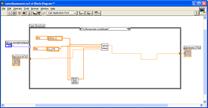
Моделирование ПИД-регулятора в пакете LabVIEW
Особенности реализации алгоритмов регулирования библиотеки PID Control LabVIEW.
опулярный в среде автоматчиков программный пакет LabVIEW (NationalInstruments, США) можно использовать для разработки как одноуровневых, так и двухуровневых систем управления. В первом случае платы УСО устанавливаются в слоты расширения компьютера или модули сбора данных подключаются к коммуникационному порту, а LabVIEW применяется для разработки исполняемых (standalone) приложений на Windows или Linux платформах. Второй вариант предусматривает, что задачи непосредственного управления решаются на нижнем уровне PLC-контроллерами, а LabVIEW в сочетании с программным модулем DSC применяется только на верхнем уровне АСУ в качестве SCADA системы.
Если для программирования PLC уже давно разработаны и широко применяются стандартные инженерные языки, то для программирования задач управления на компьютерах одноуровневых систем, обычно требуется привлечение профессиональных программистов. Что же делать автоматчикам, которые не владеют средствами программирования на языках высокого уровня, но знают требования и особенности решения задач автоматизации объекта управления?
Техника программирования в графической среде LabVIEW подобна использованию инженерных языков, в частности FBD. Кроме того, подобно библиотечным функциональным блокам языка FBD, для LabVIEW разработаны инструменты для быстрого и мощного синтеза системы управления. Библиотека содержит набор функций, предназначенных для создания в среде LabVIEW программ регулирования технологическими процессами.
Алгоритм стандартного ПИД регулятора
Наиболее распространен в промышленности ПИД (пропорционально-интегрально-дифференциальный) алгоритм регулирования, например для управления теплотехническими, гидродинамическими и массообменными процессами. Параметр, который регулируется, рассматривается как переменная процесса (температура, давление, расход). Оператор вводит задание, т.е. требуемое значение переменной процесса. ПИД-регулятор определяет значение управляющего воздействия, например, мощность обогрева или положение регулирующего клапана. Это значение влияет на переменную процесса и приводит ее к заданному значению.
В стандартном ПИД-регуляторе LabVIEW, для сравнения задания (SP) и значения переменной процесса (PV) определяется значение рассогласования (е):
![]()
Общая теоретическая формула расчета управляющего значения по ПИД закону, как известно, выглядит как

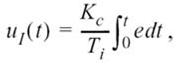
где Kc — коэффициент пропорциональности регулятора, Ti — время интегрирования в минутах (так называемое время изодрома), а Td — время дифференцирования в минутах.
Пропорциональная составляющая управляющего воздействия определяется регулятором как:
![]()
при этом интегральная составляющая равняется:
а дифференциальная составляющая:
![]()
Ниже описываются процедуры, которые используются в алгоритме ПИД-регулятора библиотеки и могут быть при необходимости отключены или изменены пользователем.
Фильтрация переменной процесса
Процедура фильтрации снижает влияние шума:
![]()