Курсовая работа: Одновісний гіроскопічний стабілізатор
Принцип дії цих приладів наступний:
Коли обурюючий момент не співпадає з моментом двигуна, в гіроскопі утворюється кут прецесії, який в датчику кута перетворюється в електричну величину. Вона далі підсилюється в підсилювачі і починає керувати двигуном. Причому в залежності від полярності даної величини двигун починає обертатися у відповідну сторону і через редуктор впливає на гіроскоп. Коли обурюючий момент співпадає з моментом двигуна, кут прецесії дорівнює нулю, а отже, дорівнює нулю і сигнал датчика кута.
3. Аналіз і синтез лінійної САК
3.1. Структурна схема САК

Рис.3.1.1
На схемі показані передатні функції таких елементів системи:
Гіроскоп ![]() ;
;
Датчик кута ![]() ;
;
Підсилювач ![]() ;
;
Двигун з редуктором ![]() .
.
3.2. Передаточні функції САК
Передаточна функція розімкненої системи:
![]() ;
;
Передаточна функція замкненої системи:
![]()
Передаточна функція за похибкою:
![]()
3.3. Визначення стійкості системи
Визначимо стійкість системи за критерієм Гурвіца.
Характеристичне рівняння замкненої системи:
![]()
![]() ,
, ![]() ,
, ![]() ,
, ![]()
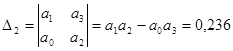
Побудуємо визначник Гурвіца:
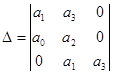
![]()
![]()
Отже, наша система стійка, бо всі визначники Гурвіца додатні.
Перевіримо правильність наших суджень за критерієм Найквіста. Передаточна функція розімкненої системи у частотній області має вигляд (замінимо ![]() ):
):
![]() ,
,
Помножимо чисельник і знаменник на комплексно спряжений вираз знаменника:

де ![]() - дійсна частина передаточної функції;
- дійсна частина передаточної функції;