Курсовая работа: Одновісний гіроскопічний стабілізатор
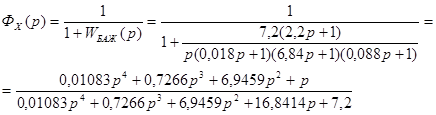
Визначимо передаточну функцію системи за похибкою:
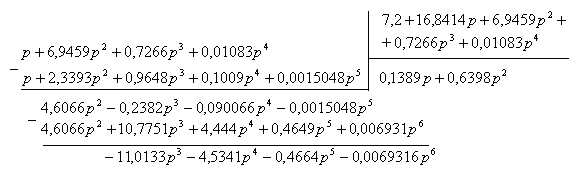
Знайдемо коефіцієнтипохибок ![]() ,
, ![]() ,
, ![]() поділивши поліном чисельника на поліном знаменика функції
поділивши поліном чисельника на поліном знаменика функції ![]() :
:
![]()
Усталена похибка при гармонічній вхідній дії має вигляд:

в нашому випадку:

Графік усталеної похибки представлений на рис. 3.8.1.
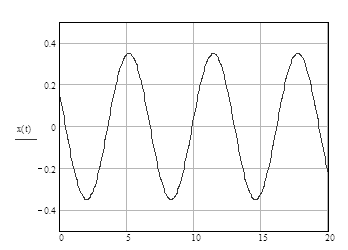
Рис.3.8.1
3.9. Моделювання
Змоделюємо реакцію системи на одиничний вхідний сигнал до корекції (рис.3.9.1, 3.9.2)та після неї (рис.3.9.3, 3.9.4) в середовищі MathLab.
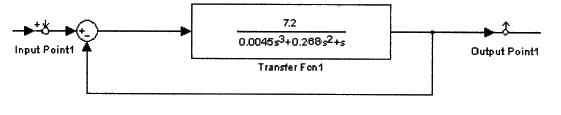
Рис.3.9.1
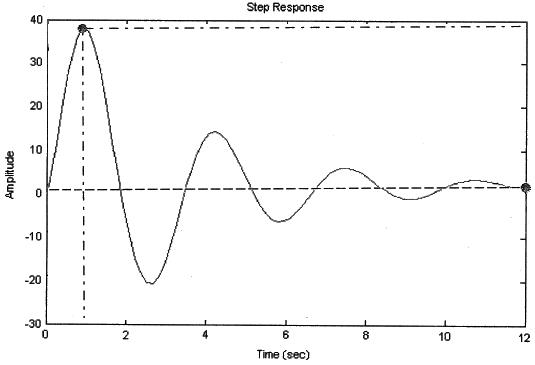
Рис.3.9.2
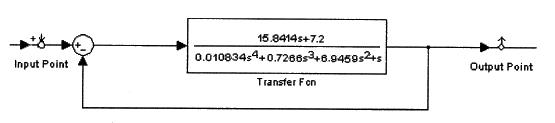
Рис.3.9.3
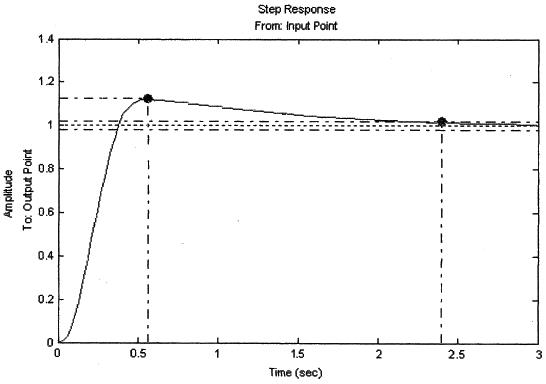
Рис.3.9.4
При моделюванні САК до корекції виявлено, що система наближається до стійкої.
При моделюванні перехідної характеристики скорегованої САК виявлено, що система стійка, час регулювання складає ![]() , перерегулювання
, перерегулювання ![]() .
.
4. Аналіз дискретної САК
4.1 Визначення періоду дискретизації
Визначимо період дискретизації імпульсного елементу, в якості формувача імпульсів використаємо екстраполятор нульового порядку.
Використовуючи ЛАЧХ розімкненої системи, визначимо період дискретизації: ЛАЧХ перетинає вісь -20дБ при ![]() . Тоді за теоремою Котельникова:
. Тоді за теоремою Котельникова: ![]() де циклічна частота
де циклічна частота ![]() обирається рівною
обирається рівною ![]() . Отримаємо
. Отримаємо ![]() і період дискретизації рівний
і період дискретизації рівний ![]() .
.
4.2. Передаточні функції
Досліджуємо систему, що зображена на рис.4.2.1.

Рис.4.2.1
Визначимо дискретну передаточну функцію розімкненої та замкнутої ДСАК відносно вхідної дії: