Курсовая работа: Проектирование электропривода подач металлорежущего станка
![]()
![]()
![]()
В результате работы программы NCD получены следующие коэффициенты PID-регулятора при периоде квантования 0,05 секунды:
Kp=2,3153;
Ki=5,8446;
Kd=0,4191.
График переходного процесса системы с использованием PID-регулятора показан на рисунке 1 ниже.
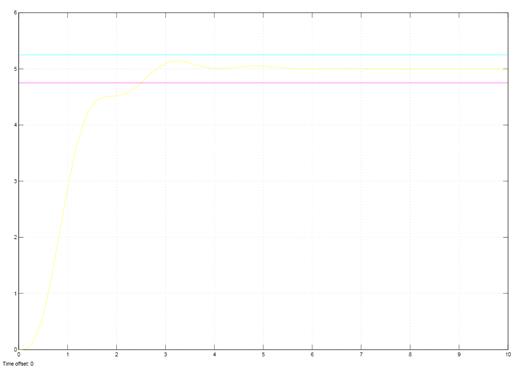
Рисунок 1. Переходный процесс с использованием PID-регулятора.
В результате, время переходного процесса снизилось на 8,8 секунды до 2,5 секунд, при времени первого согласования 1,38 секунд выход составляет 4,15 радиан, что удовлетворяет техническому заданию.
ЗАКЛЮЧЕНИЕ
В работе спроектирован электрический привод подач металлорежущего станка с применением PID-регулятора, удовлетворяющий требованиям tп =6c, t1 =1,38c, σ=6,3%, σн =16,3% и δС =±0,157рад. Коэффициенты PID-регулятора: Kp=2,3153, Ki=5,8446 и Kd=0,4191.
ПРИЛОЖЕНИЕ
ТЕХНИЧЕСКИЕ ДАННЫЕ ДВИГАТЕЛЯ СЛ-661
1. Номинальное напряжение Uн =110В.
2. Полезная мощность P=230Вт.
3. Скорость вращения ротора n=2400об/мин.
4. Ток якоря Iя =2,6А.
5. Ток обмотки возбуждения Iв =0,2А.
6. Момент на валу M=0,925Н∙м.
7. Сопротивление якоря Rя =1,73Ом.
8. Индуктивность якоря Lя =0,8Гн.
9. Момент инерции Jg =12∙10-3 кг∙м2 .
ЛИТЕРАТУРА
1. Конспект лекций по дисциплине «Проектирование автоматизированных систем».
2. Абакулина Л. И., Рахманова И. О. «Проектирование автоматизированных систем: Методические указания к выполнению курсовой работы» - С.-Пб.: СЗТУ, 2006г.
3. Конспект лекций по дисциплине «Теория автоматического управления».
4. Курсовая работа по дисциплине «Теория автоматического управления электромеханическими системами».
5. Курсовая работа по дисциплине «Программное обеспечение компьютерных систем управления».