Курсовая работа: Проектирование электропривода подъема мостового крана
![]()
Малой некомпенсируемой постоянной времени контура регулирования скорости является электромагнитная постоянная двигателя, т.е. принимаем ![]() .
.
Большой компенсируемой постоянной времени контура регулирования скорости является механическая постоянная двигателя.
Для получения нулевой ошибки в статике и форсировки переходных процессов в динамике регулятор скорости должен быть представлен в виде ПИ – регулятора.
Настроим регулятор скорости на симметричный оптимум.
Желаемая передаточная функция контура скорости настроенного на симметричный оптимум:
![]() (6.14)
(6.14)
Передаточная функция объекта регулирования:
![]() (6.15)
(6.15)
Разделив желаемую передаточную функцию контура скорости, на передаточную функцию объекта регулирования, получим передаточную функцию регулятора скорости:
![]() (6.16)
(6.16)
где
![]() ,
,
![]() (6.17)
(6.17)
Где ![]() - суммарный момент инерции привода
- суммарный момент инерции привода
![]()
![]() (6.18)
(6.18)
![]()
![]() (6.19)
(6.19)
![]()
Расчет переходных процессов производятся в пакете Matlab 6.5.
Модель для исследования работы привода мостового крана приведена на рисунке 6.5:
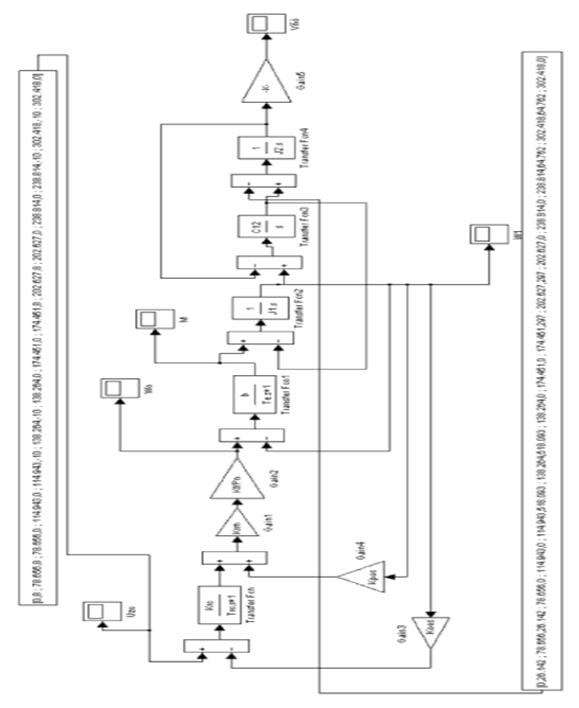
Рисунок 6.5 – Модель для исследования работы привода мостового крана.
7 Проверка правильности расчета мощности и окончательный выбор двигателя
Проверку правильности расчета мощности выполним методом средних потерь.
Полные номинальные потери в двигателе равны:
![]() (7.1)
(7.1)
![]()