Курсовая работа: Проектирование электропривода подъема мостового крана
1 - двигатель;
2 - соединительная муфта;
3 - редуктор;
4 –барабан;
5 – канат;
6 – полиспаст;
7 – грузозахватывающего устройства;
3.2 Выбор типа привода и способа регулирования координат
Для приведения в движение механизма крана можно использовать несколько вариантов двигателей. Это может быть двигатель постоянного тока независимого или последовательного возбуждения, может быть асинхронный двигатель. Можно применять двигатели общепромышленного исполнения. Также промышленностью выпускаются специальные крановые серии двигателей постоянного и переменного тока. Каждый из этих двигателей имеет свои достоинства и недостатки. Так, например, двигатели постоянного тока позволяют легко и хорошо регулировать скорость вращения, но по габаритам они намного превосходят двигатели переменного тока. Асинхронные двигатели по габаритам меньше, но система регулирования двигателей переменного тока сложнее.
Возможными способами регулирования скорости вращения двигателей постоянного тока являются регулирование напряжения питания с помощью управляемых выпрямителей для двигателей с независимым возбуждением и шунтированием якоря для двигателей с независимым и последовательным возбуждением.
Для управления асинхронным двигателем с короткозамкнутым ротором можно использовать преобразователь частоты.
Все эти способы так же отличаются друг от друга сложностью, потерями, стоимостью и требуют выбора оптимального способа регулирования для каждого конкретного случая.
Ниже приведены возможные решения с учетом предъявляемых к приводу требований.
двигатель постоянного тока с независимым возбуждением, регулирование напряжения с помощью управляемого выпрямителя;
двигатель постоянного тока с последовательным возбуждением, шунтирование якоря;
двигатели общепромышленного исполнения с короткозамкнутым ротором, частотное управление;
двигатели общепромышленного исполнения с фазным ротором, сопротивления в цепь ротора;
3.3 Оценка и сравнение выбранных вариантов
Оценка и сравнение данных вариантов осуществляется с помощью метода экспертных оценок. Выбираем несколько критериев сравнения. В нашем случае это: массогабаритные показатели, потери, стоимость, надежность и плавность регулирования. Каждому из этих критериев присваиваем определенный максимальный бал и затем производим оценку вариантов по этим критериям, выставляя им соответствующие балы. После этой процедуры производится подсчет баллов, набранных каждым из вариантов, и выбирается тот вариант, который имеет наибольший суммарный балл. Диаграмма сравнения приведена на рисунке 3.2.
В результате получили следующее распределение баллов:
S1=4*5+3*5+4*3+4*4+2*4+5*4 = 91;
S2=2*5+3*5+3*3+1*4+4*4+3*4 = 66;
S3=5*5+4*5+4*3+4*4+1*4+5*4 = 97;
S4=5*5+4*5+4*3+4*4+1*4+4*4 = 74;
Из данных соотношений видно, что максимальный суммарный балл имеет двигатели общепромышленного исполнения с короткозамкнутым ротором и частотным управлением.
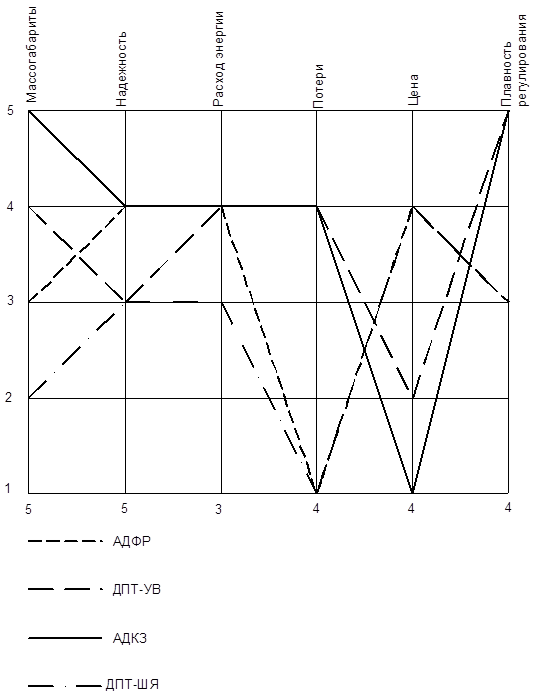
Рисунок 3.2 - Оценочная диаграмма суммарных результатов
4 Расчет силового электропривода
4.1 Выбор двигателя