Курсовая работа: Проектирование электропривода подъема мостового крана
![]() (1.32)
(1.32)
![]()
![]() (1.33)
(1.33)
Перейдем к эквивалентной трехмассовой расчетной схеме, используя метод последовательных упрощений.
Расчет параметров эквивалентной схемы производится по следующим формулам:
![]() ,
,![]() (1.34)
(1.34)
![]() Н*м.(1.35)
Н*м.(1.35)
Эквивалентная жёсткость рассчитывается следующим образом:
 Н*м(1.36)
Н*м(1.36)
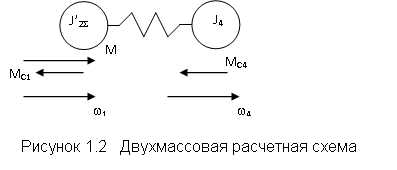
Перейдем к двухмассовой расчетной схеме, изображенной на рисунке 1.2.:
![]()
![]() (1.37)
(1.37)
![]() Н*м.(1.38)
Н*м.(1.38)
![]() Н*м.(1.39)
Н*м.(1.39)
1.4 Построение нагрузочной диаграммы и механической характеристики рабочей машины
Все параметры, требуемые для построения нагрузочной диаграммы, рассчитаны выше.
Нагрузочная диаграмма представлена на рис. 1.2.
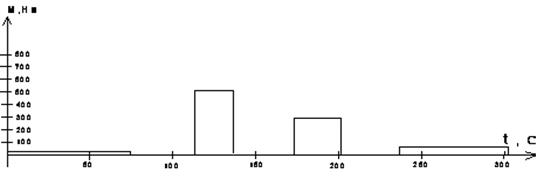
Рисунок 1.3 – Нагрузочная диаграмма
Время переходного процесса меньше, чем 10 % от времени установившегося движения. Поэтому при составлении нагрузочной диаграммы не надо дополнительно учитывать динамический момент.
Зная моменты нагрузки, можно построить механические характеристики рабочей машины. Характеристики представлены на рисунке 1.4.
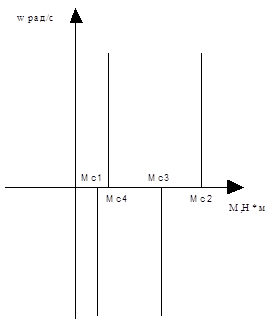 |
??????? 1.4 ? ???????????? ?????????????? ??????? ??????
2. Анализ и описание системы “Электропривод - сеть” и “Электропривод - оператор”
Электропривод механизма подъема мостового крана питается стандартным трехфазным напряжением 380 В частотой 50 Гц. В промышленной сети возможны значительные броски напряжения, а также могут возникать аварийные ситуации, поэтому необходимо обеспечить работоспособность установки при возможных колебаниях напряжения в сети и обеспечить защиту от токов короткого замыкания. Для этого привод подключаем к сети через автоматический выключатель, который также обеспечивает защиту двигателя от возможного короткого замыкания, как со стороны питающей сети, так и со стороны нагрузки.
Управление краном осуществляется непосредственно оператором-крановщиком, поэтому управление должно быть относительно простым, позволяющим легко управлять разгоном и торможением крана, а так же осуществлять фиксированный режим работы на номинальных скоростях перемещения.
3. Выбор принципиальных решений
3.1 Построение механической части привода
Кинематическая схема электропривода механизма подъема изображена на рис. 3.1.
Вал двигателя через муфту соединен с входным валом редуктора. Редуктор понижает скорость вращения и одновременно увеличивает момент. Выходной вал редуктора соединен через муфту с канатным барабаном. Полиспаст крепится на двух канатах. К полиспасту крепится грейфер. Полиспаст предназначен для уменьшения линейной скорости грейфера. Канатный барабан посредством ременной передачи соединен с кабельным барабаном, предназначенным для подачи питающего кабеля.
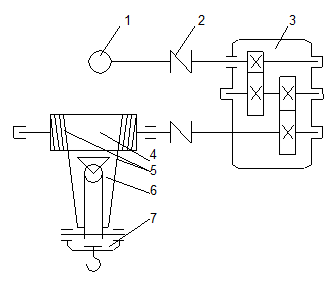 |
Рисунок 3.1 - Кинематическая схема электропривода механизма подъема.
Составление расчетной схемы механической части электропривода приведено в пункте 4.2