Курсовая работа: Проектирование модуля главного движения станка сверлильно-фрезерно-расточной группы
Минимальная частота вращения электродвигателя определяется диапазоном регулирования привода с постоянным моментом.
5.5 Выбор типа привода
Для заданного числа ступеней коробки предпочтительным является использование встроенного привода с автоматической переборной коробкой с использованием подвижных блоков колёс перемещаемых с помощью кулачкового механизма. В данном случае приемлем вариант с нормальной структурой: 1*2*2=4.
5.6 Составление структурной сетки привода
Для выбранной структуры привода главного движения выбирается прямой кинематический порядок привода: 1*2*2=4.
В соответствии с этим структурная сетка привода будет выглядеть так:
Окончательно принимаем следующую кинематическую схему. Кинематическая схема привода модуля главного движения показана на рисунке 6.
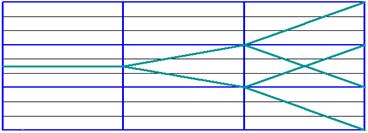
Рис. 5 Структурная сетка
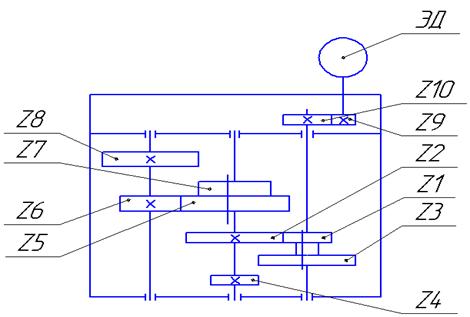
Рис 6. Кинематическая схема привода модуля главного движения
5.7 Построение графика частот вращения шпинделя
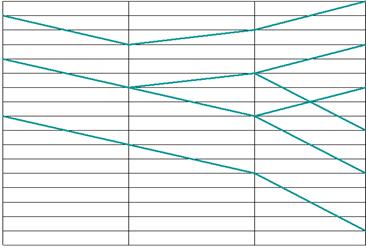
Рис 7. График частот вращения шпинделя
5.8 Определение передаточных отношений шпинделя
С помощью графика частот (Рис 7.) определяем все передаточные отношения.
![]()
![]()
![]()
![]()
![]()
5.9 Определение чисел зубьев передач
Исходя из значений передаточных отношений, определим числа зубьев передач табличным методом.
Суммарное число:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
6 Расчёты и разработка конструкции модуля с применением ЭВМ