Курсовая работа: Проектирование слайсера нового поколения
ВВЕДЕНИЕ
1. АНАЛИЗ ОБЪЕКТА АВТОМАТИЗАЦИИ И ПОСТАНОВКА ЗАДАЧИ ПРОЕКТИРОВАНИЯ
1.1 Анализ объекта автоматизации
1.2. Критический анализ объекта автоматизации
1.3 Анализ методов автоматизации
1.3.1 Анализ первичных преобразователей
1.3.2 Анализ исполнительных органов
1.3.3 Анализ СУ
1.4 Постановка задачи проектирования
2. ПРОЕКТИРОВАНИЕ СТРУКТУРЫ СИСТЕМЫ
2.1 Структурная схема подключения датчиков
2.2 Структурная схема подключения исполнительных механизмов
2.3 Распределение пинов микроконтроллера
3. ПРОЕКТИРОВАНИЕ МОДЕЛИ СИСТЕМЫ В СРЕДЕ PROTEUS
3.1 Проектирование моделей датчиков
3.2 Проектирование моделей исполнительных механизмов
3.3. Проектирование панели управления устройством
4. РАЗРАБОТКА ЧЕРТЕЖА БЛОК–СХЕМЫ АЛГОРИТМА ПРОГРАММЫ УПРАВЛЕНИЯ
4.1 Построение блок–схемы алгоритма
ВЫВОДЫ
ВВЕДЕНИЕ
В современной кулинарной промышленности, а также в сфере обслуживания, с ростом населения, возрастает потребность в быстром и качественном производстве пищевой продукции, а также максимальной подготовке ее к употреблению, так как «время-деньги».
Одно из направлений ускорения данного производственного процесса является проектирование, изготовление, а затем и внедрения различных машин для быстрой очистки, нарезки и прочей механической обработки пищевой продукции. Одной из таких машин является агрегат, как правило, с ручным управлением слайсер.
1. АНАЛИЗ ОБЪЕКТА АВТОМАТИЗАЦИИ И ПОСТАНОВКА ЗАДАЧИ ПРОЕКТИРОВАНИЯ
1.1 Анализ объекта автоматизации
Слайсер - специализированное устройство для точной и быстрой нарезки колбасы в больших количествах. Данный прибор является часто встречаемым кухонным прибором в любом супермаркете. Не имеет значение какую модель, какой фирмы рассматривать- все они имеют примерно одинаковую структуру и принцип действия, а как следствие- одинаковые недостатки, но об этом позднее. Остановимся подробнее на принципе действия. Оператор прибора выставляет ширину отрезаемого ломтя при помощи движения задней стенки, затем вручную подносит колбасу и держит ее до тех пор, пока не произойдет отрезка (опять же ручным движением вращающегося ножа), затем отрезаемый ломоть смещается в сторону и оператору необходимо подвинуть колбасу еще вперед и снова держать до момента отрезки. После окончания непосредственно нарезки необходимо взять все отрезанные куски и вручную разложить их на тарелке, что неминуемо ведет к увеличению времени упаковки.
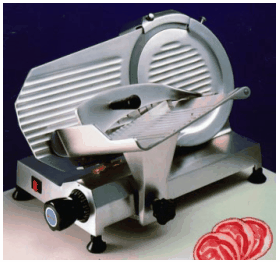
Рисунок 1.1 Типичный Слайсер.
1.2 Критический анализ объекта автоматизации
А) Задняя стенка выставляется вручную, что не дает возможность максимально точно выставить ширину нарезки. Следует заметить, что автоматизированный электропривод справиться с данной задачей гораздо быстрее, чем человек, который будет подгонять размер. Что касается ремонтопригодности и надежности, то здесь нареканий нет.
Б) Нож. Скорость его вращения не регулируется, поэтому нет подстройки под тип колбасы (Салями – твердая, Докторская- мягкая), а это важно для экономного использования электроэнергии, а также для быстрого и ровного отрезания, ведь если скорость будет не соответствовать, то колбаса может быть просто порвана на куски. Что касается надежности и ремонтопригодности, то здесь вновь нет способов применить автоматизацию для улучшения данных качеств.
В) Прижимное устройство. Его попросту нет, либо оно представлено прижимной планкой, которую необходимо постоянно придерживать. Человек не совершенен - его рука устает. И хоть благодаря непосредственному контролю человека может регулироваться сила и корректироваться вектор прижимания - это нерационально. А силу прижима можно поддерживать и средствами автоматизации, но об этом в следующем разделе.
Г) «Наезд-ножа-на-колбасу». Данный механизм также отсутствует и это плохо. С одной стороны если бы человек вручную подносил колбасу, то для пальцев это безопаснее, но учитывая пункт В) разумнее сделать автоматику под управлением контроллера.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--