Курсовая работа: Проектирование слайсера нового поколения
Рисунок 1.3 Схематическое изображение передачи движения через косоугольные шестерни на конвейерную ленту
Б) Поворот тарелки будет осуществляться шаговым двигателем через цепную передачу, возможен варианта встраивания его непосредственно в сервировочное устройство.
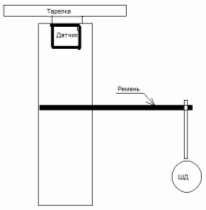
Рисунок 1.4 Поворотный механизм с датчиком
В) «Прижиматель»- представляет собой прижимную лопатку на одном конце которой закреплен оптодатчик наличия колбасы. Движение передается от ДПТ через шестерню на валу к зубцам на «хвосте» прижимной лопатки.
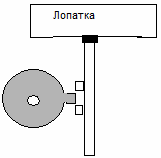
Рисунок 1.5 Передача движения от двигателя к прижимной лопатке. Вид сверху.
В исходное положение лопатка будет возвращаться после прекращения действия ДПТ под действием деформированной пружины, прикрепленной к вращающей шестерне.
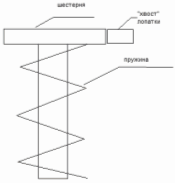
Рисунок 1.6 Пружина как возвратный механизм. Вид сбоку.
Г) Двигатель движения ножа по направляющей. Реагирует на сигналы концевых датчиков. Сам нож с вращающим его двигателем перемещается по червячной передаче.
Д) Двигатель вращения ножа - получает сигнал от контроллера о включении/отключении. Вращает нож с переменной скоростью. Управляется ШИМ, реализованным на таймере счетчике.
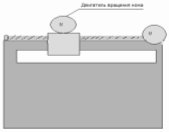
Рисунок 1.7 Механизм перемещения ножа
1.3.3 Анализ СУ
СУ может быть реализована как аппарат с жесткой логикой Мили/мура, как релейно-контакторная схема, но оптимальный вариант это реализация на контроллере ARM7.Именно этот вариант позволит более точно настроить и отладить систему, а также упростит автоматизацию ряда узлов – задней стенки и т .д. Для упрощения реализации проекта контроллер LPC2138 будет взят не как отдельный элемент, а уже в виде готового к монтажу модуля MMLPC2138-0-2.
MMLPC2138-0-2 – миниатюрный модуль с установленным 32-разрядным ARM микроконтроллером LPC2138 NXP. Все выводы микроконтроллера доступны на разъемах платы. Периферия включает два таймера, два интерфейса UART, два I2C, SPI, АЦП, ЦАП, сорок семь линий ввода/вывода.
Отличительные особенности
· установленный микроконтроллер LPC2138: ARM7TDMI-S™ 16/32 бит, 512 кБ Flash-памяти программ, 32 кБ ОЗУ, часы реального времени, восемь 10-битных АЦП, 2 порта UART, I2C, SPI, два 32-битных таймера, восемь каналов захвата/хранения, ШИМ (6 выходов), "WatchDogTimer", 5 В совместимые входы/выходы, работоспособность до 60 МГц (встроенный PLL);
· последовательная DataFlash на 32Mb (4MB);
· часы РВ с встроенным резонатором 32,768кГц и батареей (устанавливается дополнительно);
· питание 3,3В или 3,8 – 16В от встроенного регулятора;
· компактные размеры 39х36мм;
· работает в комплексе с отладочной платой EVBlpc213x;
· отладочный интерфейс JTAG.
Комплектация
· отладочная плата MMLPC2138-0-2.
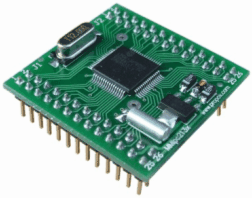
Рисунок 1.8 MMLPC2138-0-2
1.4 Постановка задачи проектирования
Проанализировав вышеизложенный материал, были сформулированы следующие задачи данной курсовой работы:
– разработка структуры системы управления подсистемами
– выбор датчиков тока, угла поворота, скорости, преобразователя частоты;