Курсовая работа: Проектування автоматизованого електропривода візка мостового крану
Система керування: з сумуючим підсилювачем.
Вид зворотного зв’язку: за швидкістю двигуна.
2. Розрахунки навантажувальної діаграми, тахограми руху виконавчого органу та попередній вибір потужності двигуна
Ці розрахунки необхідні для попереднього вибору потужності двигуна і швидкості його обертання. Їх виконують для механізмів зі змінним режимом роботи.
Зазвичай, навантажувальну діаграму Мс (t) і тахограму ![]() розраховують для найбільше важкого чи усередненого циклу роботи виконавчого механізму. Нижче описані методики розрахунків Мс (t) і
розраховують для найбільше важкого чи усередненого циклу роботи виконавчого механізму. Нижче описані методики розрахунків Мс (t) і ![]() деяких виробничих механізмів.
деяких виробничих механізмів.
|
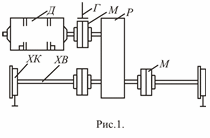
Візок мостового крана може переміщуватись на різні віддалі в межах прольоту. Тому розрахунковим циклом переміщення візка приймають такий: рух на віддаль lр = L/2=20/2=10 м в одну сторону з вантажем і у зворотну сторону без вантажу, кількість циклів за годину N=30 .
Для побудови навантажувальної діаграми необхідно знати моменти сил статичного опору і втрати в кінематичних ланках.
Момент статичного опору при русі візка з вантажем
![]() /1/
/1/
де kр = 2,2 - коефіцієнт, який враховує тертя реборд ходових коліс об рейки; ![]() - коефіцієнт тертя ковзання; fк =0,001 - коефіцієнт тертя кочення.
- коефіцієнт тертя ковзання; fк =0,001 - коефіцієнт тертя кочення.
Потужність на валу двигуна при русі візка з вантажем
 , /2/
, /2/
де ![]() =
=![]() - радіус ходових коліс, м;
- радіус ходових коліс, м; ![]() =0,6 м/с - швидкість руху візка;
=0,6 м/с - швидкість руху візка; ![]() ККД при русі візка з вантажем, що відповідає
ККД при русі візка з вантажем, що відповідає ![]() на рис.2.
на рис.2.
Момент статичного опору при русі візка без вантажу
![]() /3/
/3/
Потужність при русі візка без вантажу
 , /4/
, /4/
де η=0.71 - ККД передачі при коефіцієнті навантаження

який знаходять із кривої, наведеної на рис.2.

Рис. 2. Залежність ККД зубчатих передач від коефіцієнта ![]() .
.
При розгоні і гальмуванні візка відбувається розкачування вантажу, підвішеного на тросі. Величина відхилення від вертикального положення буде мінімальною, якщо час розгону
![]() і гальмування
і гальмування ![]() будуть дорівнювати періоду власних коливань:
будуть дорівнювати періоду власних коливань:
![]() ,/5/
,/5/
де ![]() висота підвіски вантажу.
висота підвіски вантажу.
Виходячи з цієї умови, величина прискорення
![]() /6/
/6/