Курсовая работа: Противоугонный захват козлового крана или перегружателя
a = 112,5 мм /рис. 2/,
b = 1250 мм /рис. 2/,
Pп. – усилие в пружине, кН, определяется по формуле:
![]()
![]() (2.4)
(2.4)
где ц – коэффициент запаса нажатия пружины, ц = 1,5 ч 2 /4, стр. 127/,
принимаем ц = 2;
Gр. – вес рычага, кг, принимаем Gр = 50 кг = 500 Н;
е = 80 мм /рис. 3/;
с = 750 мм /рис. 3/;
После подстановки всех параметров в формулу (2.3) получаем
![]()
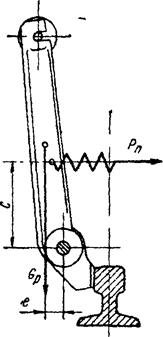
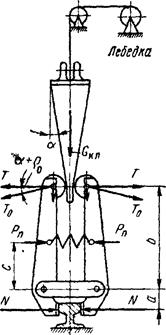
Рис. 2. Схема сил, действующих на клещевой захват
Рис. 3. Схема к определению усилия в пружине
2.2 Вес клина
Вес клина определяем по формуле:
![]() (2.5)
(2.5)
где б – угол наклона рабочей поверхности клина к вертикали, принимаем б = 10° /4, стр. 126/;
ср. – коэффициент сопротивления качению ролика по плоскости клина, ср. = 0,2 (при подшипниках) /4, стр. 127/.
![]() ;
;
2.3 Ход клина
Ход клина влияет на канатоёмкость барабана лебёдки подъёма клина. Ход клина определяется величиной отхода планок клещей от головки рельса и упругим прогибом рычагов. Учитывая неточность стыковки рельсов, отход планок губок принимаем для перегружателей 8 мм.
Общий ход клина /рис. 4/
![]() (2.6)
(2.6)
где kx – коэффициент запаса хода клина, компенсирующий износ планок, а также неточности изготовления и монтажа, kx = 1,5 /4, стр. 128/;
![]() – ход клина, определяемый зазором между планкой рычага и рельсом;
– ход клина, определяемый зазором между планкой рычага и рельсом;
![]() – ход клина, определяемый упругим прогибом рычага клещей;
– ход клина, определяемый упругим прогибом рычага клещей;
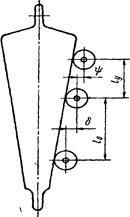
Рис. 4. Схема к определению хода клина