Курсовая работа: Процесс создания математической модели объекта
1. Время переходного процесса.
Временем переходного процесса считается то время, когда график переходной функции попадает в область значений от 0,95Yуст до 1,05Yуст , т.е. ±5% от установившегося значения и не выходит из этой области. Судя по графику переходного процесса, и по значениям, полученным в результате расчета при построении графика, видно, что время переходного процесса равно 40 секундам (t рег = t п/п = 40 сек ).
2. По графику видно, что переходной процесс является колебательным. Колебания данного процесса настолько малы, что изменения значений относительно Yуст = 1 составляют тысячные доли.
3. Абсолютное перерегулирование s абс = Ymax – Yуст = 0,006218572.
4. Статическая ошибка. Система является статической если e ст >0. Если e ст = 0, то система является астатической. Судя по полученным значениям и по виду переходной характеристики, данная система является астатической, т.к. e ст = 0.
5. Т.к. переходной процесс является колебательным и имеет А1 и А3 (первая и третья амплитуды переходного процесса), то можно найти и степень затухания. ![]()

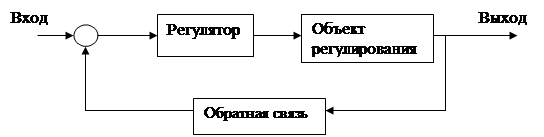
6. Функциональная схема
Системы Автоматического Управления в общем виде выглядит следующим образом:
 |
7. Вывод
Математическая модель объекта регулирования системы, полученная в работе, является достаточно адекватной исходным данным. Об этом говорят значения полученных абсолютной и относительной погрешностей (D = 0,0001 и D = 0,0101 %). По частотным характеристикам самого объекта можно определить его некоторые свойства (полоса пропускания сигнала, устойчивость, отставание выходного сигнала от входного).
При получении математической модели всей системы был использован ПИД – регулятор. Сигнал измененный по заданному закону подается на объект регулирования и объект работает с измененным сигналом. Полученная замкнутая система является устойчивой.
Показатели качества регулирования, определенные в работе, говорят о том, что переходной процесс имеет: малое перерегулирование, что очень важно в системах подобного рода (контроль температуры и прочее); низкую степень колебательности, что также является показателем качества; система является астатической, т.е. система достигает необходимого выходного значения; что касается времени регулирования, то оно составляет 40 сек. Такое время переходного процесса является негативным в системах реального времени, что же касается систем контроля температуры, то этот показатель является довольно адекватным, т.к. невозможно достигнуть мгновенного изменения температуры в реальных системах.
Заключение
В данной курсовой работе было проведено математическое моделирование системы контроля температуры. Нужно заметить, что данный подход не только возможен, но и с успехом применяется во всех отраслях технического производства и контроля. Этот классический подход к разработке подобных систем основан на простых линейных звеньях. В реальных же системах процессы гораздо сложнее и линейностью не отличаются. Подобная методика расчета позволяет усвоить азы теории управления и углубиться в ее математическую моделирующую сторону. Это дает возможность получить теоретический навык в работе с подобными системами, а главное, что подобные исследования позволяют более смело подходить к различного рода разработкам.
При исследовании системы были получены различные показатели системы, в частности основные ПКР. Были сделаны выводы о качестве регулирования, а по виду переходных характеристик (построенных по исходным данным и полученным в результате исследования) можно было судить об адекватности полученных моделей (об этом говорят различного рода погрешности).
Система, расчет которой был проведен, вряд ли будет работать в реальной среде, в виду того, что приведенные методики расчетов были применены, в данном случае, для систем, на которые не оказываются внешние воздействия. В свою очередь, ход расчета системы, его последовательность вполне реально могут и применяются в настоящее время в исследованиях систем.
Список литературы
1. Курс лекций «Моделирование систем управления», Магомедов М.Я.
2. Курс лекций «Идентификация и диагностика систем», Омаров О.М.-С.
3. Курс лекций «Теория автоматического управления», Омаров М.-С.М.