Курсовая работа: Расчет силового электропривода
![]()
![]()
Построим естественную механическую характеристику по формуле (41) используя математический пакет Mathcad, учитывая, что ![]() , подставляя
, подставляя ![]() , откладывая по оси х момент М, а по оси у - скорость двигателя
, откладывая по оси х момент М, а по оси у - скорость двигателя ![]() .
.
Естественная механическая характеристика двигателя представлена на рисунке 8.
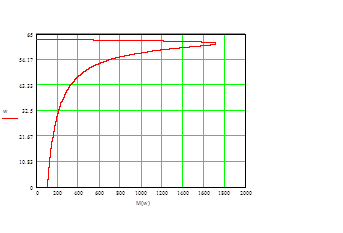
Рисунок 8 - Естественная механическая характеристика двигателя
Рассчитаем электромеханические характеристики двигателя.
В качестве базисной величины тока, принимаем номинальное значение тока ротора, приведенного к статорной цепи.
Зависимость приведенного тока ротора от скольжения определяется по формуле:
 (36)
(36)
Зависимость тока статора от скольжения определяется по формуле:
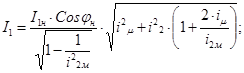 (37)
(37)
где![]() - относительный ток ротора;
- относительный ток ротора;
![]() - максимальное значение относительного тока ротора;
- максимальное значение относительного тока ротора;
![]() - относительный ток намагничивания;
- относительный ток намагничивания;
![]() - номинальный ток статора.
- номинальный ток статора.
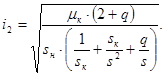
Максимальное значение относительного тока ротора:
 (38)
(38)
где - критическое скольжение;
- критическое скольжение;
![]() .(39)
.(39)
Относительный ток намагничивания:
 (40)
(40)
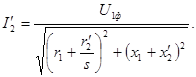
Относительный ток ротора:
 (41)
(41)
Построим естественную электромеханическую характеристику роторного тока и электромеханическую характеристику статорного тока, используя математический пакет Mathcad, подставляя ![]() , откладывая по оси х ток I, а по оси у - скорость двигателя
, откладывая по оси х ток I, а по оси у - скорость двигателя ![]() .
.
Естественные ЭМХ двигателя представлены на рисунке 9.

Рисунок 9 - Естественные электромеханические характеристики двигателя
Так как для регулирования скорости применяется ПИ – регулятор (будет показано ниже), который дает нулевую статическую ошибку, поэтому механическая характеристика привода будет абсолютно жесткой.