Курсовая работа: Расчет симметричных автоколебаний нелинейной САР
Институт ИИТиУ
Кафедра АИТ
Специальность УиИТС
Курсовая работа
по дисциплине “теория автоматического управления”
на тему “Расчет симметричных автоколебаний нелинейной САР”.
Выполнил студент группы 4-1 Ярочкина Н.В.
Принял Савин М.М.
“___”_________2006г.
С оценкой __________________
Новочеркасск 2006
Вариант задания С-49
В данной курсовой работе исследуется следящая система отработки угловых перемещений с местной обратной связью по скорости двигателя.
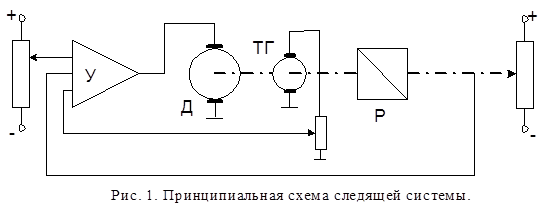

Рис. 2. Структурная схема
Параметры системы:
Ty =0.05; TД =0.1
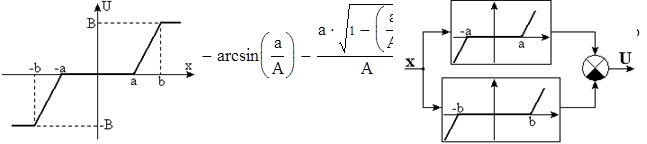 |
??: ???? ?????????????????? ? ????????????. ????? ?????? ??:
![]()
Кn =В/ba
a=0.3; b=1.1; B=10, Кn =30.303
Варьируемым параметром является время τ постоянного запаздывания усилителя У при Кос =0. Диапазон варьирования 0≤τ≤τmax . Причем в начале расчета при τгр =0 определить Кгр и ωπ . Затем из условия единственности решения найти τmax =2π/ ωπ , и считать К≤ Кгр =const при изменении τ.
ПЛАН КУРСОВОЙ РАБОТЫ ПО ТАУ
«Расчёт симметричных автоколебаний нелинейной САР»
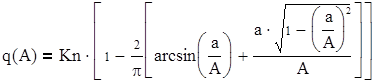
1. Рассчитать амплитуды А и частоты w периодических режимов в САР при различных значениях варьируемого параметра графоаналитическим методом гармонического баланса, исследовать устойчивость этих режимов и определить, какие из них являются автоколебаниями. При построении годографов применять ППП. Привести листинги ввода исходных данных и расчёта. Оцифровать графики значениями параметров w и А, указать масштабы на осях.
2. Рассчитать на ЭВМ численным методом решения уравнений гармонического баланса те же величины, что и п.1, а также граничное значение варьируемого параметра, при котором автоколебания находятся на границе своего возникновения и исчезновения. Построит зависимости параметров автоколебаний от значений варьируемого параметра. Привести листинги исходных данных и расчёта.
3. Выполнить с помощью ППП цифровое моделирование системы при значения варьируемого параметра больших и меньших граничного. Получить при этом временную диаграмму переходного процесса и соответствующую ей проекцию фазовой траектории в плоскости «величина-скорость». Привести схему моделирования, таблицы ввода структуры и параметров, распечатки диаграмм процессов во временной и фазовой областях.
4. Сделать выводы по работе, охарактеризовав процессы в САР, влияние варьируемого параметра, степень совпадения результатов расчета и моделирования и т.п.
Содержание
Введение
1. Расчет первоначальных параметров ![]()
2. Расчетамплитуды и частоты периодических режимов графоаналитическим
методом гармонического баланса
2.1. Применение численных методов решения системы двух
алгебраических уравнений
3.Цифровое моделирование системы и получение временной диаграммы ее переходного процесса на ЭВМ. Построение проекции фазовой траектории
4. Выводы по работе
Список литературы
ВВЕДЕНИЕ
Предметом изучения теории автоматического управления являются линейные и нелинейные системы автоматического регулирования и управления, представленные своими математическими моделями.
Цель данной курсовой работы заключается в расчёте параметров автоколебаний в нелинейной следящей системе.
Следящими называются такие системы управления, в которых происходит слежение за некоторой измеряемой величиной. Закон изменения её заранее неизвестен, а управляемая величина должна с заданной точностью воспроизводить измеряемую величину или некоторую функцию измеряемой величины.
Автоколебания, явление присущее только нелинейным системам. Автоколебания – установившейся устойчивый режим периодических колебаний во времени всех величин нелинейной системы. Для некоторых систем автоколебания являются рабочим режимом, для некоторых они недопустимы.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--