Курсовая работа: Расчет системы автоматического управления
3.1 Построить асимптотическую ЛАХ разомкнутой САУ (LНСК ).
3.2 Построить желаемую асимптотическую ЛАХ разомкнутой корректированной САУ (LЖ ), удовлетворяющей требованиям варианта по перерегулированию и времени переходного процесса.
3.3 Построить асимптотическую ЛАХ последовательного корректирующего устройства (LПС ).
Исходные параметры САУ
![]()
![]()
![]()
![]()
![]()
![]()
Т1 = 0,04 сек. Т2 = 0,3 сек. Т3 = 0,15 сек.
![]() = 4,8 сек. s = 30%LM = ±14 дБ
= 4,8 сек. s = 30%LM = ±14 дБ
 |
Структурная схема САУ
1.1 Вывод передаточной функции разомкнутой и замкнутой САУ относительно входного воздействия
![]() -
-
передаточная функция разомкнутой САУ по управляющему воздействию.
![]()
![]() -
-
передаточная функция замкнутой САУ по управляющему воздействию.

1.2 Вывод дифференциального уравнения САУ
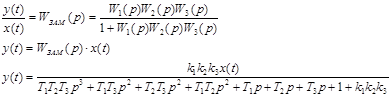
где p заменим на ![]() и получим следующее дифференциальное уравнение:
и получим следующее дифференциальное уравнение:
![]()
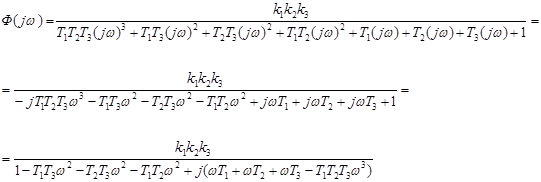
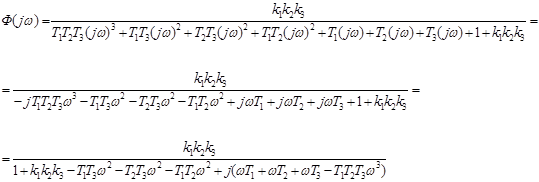
1.3 Вывод формулы для мнимой и вещественной компоненты АФХ замкнутой и разомкнутой САУ
1.3.1 Для замкнутой САУ
где p заменим на j × w и получим следующее выражение:
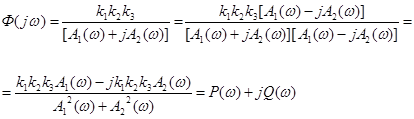
Где

![]() -
-
действительная компонента АФХ
![]() -
-
мнимая компонента АФХ
1.3.2 Для разомкнутой САУ
![]() ,
,
где p заменим на j × w и получим следующее выражение: