Курсовая работа: Разработка системы автоматического управления положением объекта
Введение
Автоматическое управление различными техническими объектами является одним из самых прогрессивных направлений в развитии техники. При автоматическом регулировании задача поддержания постоянства регулируемой величины или изменения её по какому-либо закону должна выполняться без непосредственного участия человека. Устройство, освобождающее человека от выполнения функций регулирования, называемое регулятором в совокупности с объектом управления называется системой автоматического управления (САУ). Все САУ по принципу действия можно разделить на 3 группы: разомкнутые системы (регулирующее воздействие определяется лишь информацией о цели управления, которая заключена в задающем воздействии), САУ, действующие по принципу регулирования по отклонению (регулирующее воздействие определяется не только информацией о цели управления, заключенной в задающем воздействии, но и на основе информации о результатах регулирования), системы, сочетающие принцип регулирования по отклонению и по возмущению (регулирующее воздействие определяется информацией о цели управления, заключенной в задающем воздействии, действительным значением регулируемой величины и информацией о возмущающем воздействии).
САУ, действующие по принципу регулирования по отклонению, являются в настоящее время самым распространённым классом автоматических систем. Такие системы находят широкое применение для автоматического регулирования различных физических величин в объектах, относящихся к различным отраслям техники (регулирование напряжения и частоты источников питания, давления и температуры в герметичной камере, курса и высоты полёта самолёта). В данной работе разрабатывается следящая система, которая также действует по принципу регулирования по отклонению, что существенно повышает точность ее регулирования.
Разработка системы будет проходит в несколько этапов:
– первая часть курсового проекта будет посвящена выбору и расчету основных элементов нестабилизированной системы,
– вторая часть анализу устойчивости системы и синтезу корректирующего устройства, обеспечивающего требуемые качественные показатели,
– последняя часть разработке и описанию схемы электрической принципиальной.
нестабилизированный система управление корректирующий
1. Статический расчет системы
1.1 Составление функциональной схемы системы
Из данных технического задания видно, что объект управления вращается с угловой скоростью ![]() и угловым ускорением
и угловым ускорением ![]() , следовательно, для приведения его во вращение необходим исполнительный элемент, который будет передавать вращающий момент к объекту управления. В качестве исполнительных элементов в системах автоматического управления, как правило, применяются электродвигатели постоянного и переменного тока.
, следовательно, для приведения его во вращение необходим исполнительный элемент, который будет передавать вращающий момент к объекту управления. В качестве исполнительных элементов в системах автоматического управления, как правило, применяются электродвигатели постоянного и переменного тока.
Электродвигатель будет передавать вращающий момент к объекту управления через редуктор. Для определения сигнала рассогласования необходимо включить в схему элемент сравнения, а для усиления сигнала рассогласования до величины, обеспечивающей нормальную работу электродвигателя, необходимо включить в схему усилительно-преобразовательный элемент. Таким образом, предварительная функциональная схема следящей системы может быть представлена, как показано на рисунке 1.
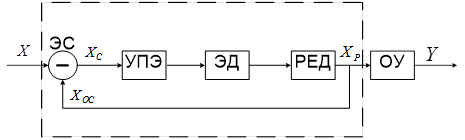
Рисунок 1
ЭС – элемент сравнения;
УПЭ – усилительно-преобразовательный элемент;
ЭД – электродвигатель;
РЕД – понижающий редуктор;
ОУ – объект управления;
X – задающее (управляющее) воздействие;
XОС – сигнал обратной связи;
XС – сигнал рассогласования;
XР – регулирующее воздействие;
Область, обведенная пунктиром на рисунке 1 – является управляющей частью системы (регулятором);
Y – регулируемая величина.
1.2 Выбор основных элементов системы
1.2.1 Выбор исполнительного электродвигателя
В большинстве автоматических систем управление потоками сырья и энергии осуществляется с помощью регулирующих органов, приводимых в движение электродвигателями постоянного и переменного тока. Выбор электродвигателя определяется мощностью, необходимой для перемещения регулирующего органа или объекта управления, а также перечнем разрешенных источников питания.
В общем случае механическая нагрузка на оси регулирующего органа (оси нагрузки) характеризуется моментом трения ![]() , моментом инерции
, моментом инерции ![]() , частотой вращения
, частотой вращения ![]() , угловым ускорением
, угловым ускорением ![]() . Обычно вал двигателя соединяется с нагрузкой через понижающий редуктор с передаточным числом
. Обычно вал двигателя соединяется с нагрузкой через понижающий редуктор с передаточным числом ![]() , тогда требуемая мощность электродвигателя для перемещения объекта управления рассчитаем:
, тогда требуемая мощность электродвигателя для перемещения объекта управления рассчитаем:
--> ЧИТАТЬ ПОЛНОСТЬЮ <--