Курсовая работа: Розрахунок приводу подачі
Стала часу тиристорного перетворювача:
5 . Розрахунок параметрів регулятора і елементів контуру регулювання струму якоря у системі підпорядкованого регулювання
Система підпорядкованого регулювання являє собою багатоконтурну систему з каскадним включенням регуляторів. При цьому число регуляторів і контурів регулювання дорівнює числу регульованих параметрів. У двоконтурній схемі (рис. 2) вихідний сигнал регулятора швидкості, включений у зовнішній контур, є заданим для регулятора струму, включеного у внутрішній контур. Налагодження регуляторів відбувається незалежно і послідовно від внутрішнього контуру до зовнішнього.
Контур струму складається з об'єкта регулювання – ланцюга якоря двигуна, силового перетворювача і регулятора струму. Контур замикається зворотнім зв'язком по величині напруги, що знімається з датчика струму в ланцюзі якоря.
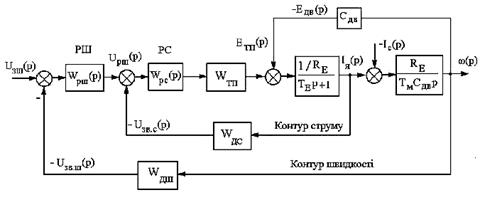
Рис. 2 Двоконтурна система підпорядкованого регулювання
Напруга зворотного зв'язку за струмом:
![]()
Максимально припустимий струм двигуна при перехідних процесах для високомоментного двигуна прийняти:
що відповідає режиму роботи в номінальних обертах. При зменшенні обертів нижче ω н величина I max буде коректуватися вузлом залежного струмообмеження ВЗСО (у бік збільшення).
Передатний коефіцієнт зворотного зв'язку по струму:
5.1 Налагодження регулятора струму:
Так як об'єкт регулювання в контурі струму поданий аперіодичними ланками, застосовується ПІ-регулятор струму, який настроюється по модульному (технічному) оптимумі. При стандартному налагодженні контуру струму звичайно зневажають внутрішнім зворотним зв'язком по ЕРС, що справедливо, якщо електромагнітна (Т е ) і електромеханічна (Т м ) постійні двигуна значно перевершують постійну часу (Т n ), и Т м >> Т е . У випадку невиконання умов характер перехідного процесу значно відрізняється від оптимального.
Тобто для відповідності перехідного процесу в контурі регулювання струму перехідному процесу в контурі оптимальній структурі, необхідний ПІ-регулятор струму з коефіцієнтом передачі К рс і постійною часу Т рс :
де ![]() с – некомпенсована мала стала часу.
с – некомпенсована мала стала часу.
Настроювання на технічний оптимум характеризуються невеликим перерегулюванням 4,3%. Тривалість перехідного процесу визначається тільки малою некомпенсованою постійною часу і складає 4,7Т μ .
Для одержання перехідного процесу в контурі струму, що відповідає налагодженню на модульний оптимум, визначимо передатну функцію регулятора струму:

5.2 Розрахунок параметрів регулятора струму:
В якості датчика струму використовуємо шунт.
Вибираємо номінальний струм шунта I ш з ряду 10, 20, 40, 100, 200А по номінальному струму привода: I ш ≥ I п .
Обираємо ![]()
При протіканні через шунт номінального струму шунта I ш с шунта знімається напруга 75 мВ, тому:
- коефіцієнт передачі шунта: