Курсовая работа: Синхронизация как механизм самоорганизации системы связанных осцил
Введем понятие динамической системы. Под динамической системой понимают любой объект или процесс, для которого однозначно определено понятие состояния как совокупности некоторых величин в данный момент времени, и задан закон, который описывает изменение начального состояния с течением времени. Этот закон позволяет по начальному состоянию прогнозировать будущее состояние динамической системы, и его называют законом эволюции. Описание динамических систем может осуществляться с помощью дифференциальных уравнений [2].
Синхронизация может возникнуть лишь в автоколебательных системах. Автоколебательной системой называют систему, преобразующую энергию постоянного источника в энергию колебаний.
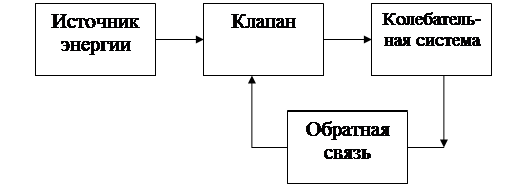
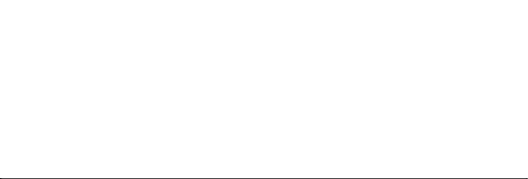
Рис. 1. Общая схема автоколебательной системы.
Необходимыми элементами всякой автоколебательной системы являются:
· собственно колебательная система;
· источник постоянной энергии;
· элемент, управляющий поступлением энергии в колебательную систему, который мы условно назовем клапаном;
· цепь обратной связи между колебательной системой и клапаном. В некоторых системах указанные элементы можно явно выделить, в других они бывают совмещены, так что их функции не сразу очевидны. Но в той или иной форме эти элементы присущи всякой автоколебательной системе [3].
Выделим общие свойства автоколебательных систем:
· будучи изолированным, осциллятор продолжает генерировать один и тот же ритм, пока не иссякнет источник энергии [1];
· форма автоколебаний определяется параметрами системы и не
зависит от того, как система была «включена», т.е. от перехода
к стационарным колебаниям [1];
· автоколебания устойчивы по отношению к возмущениям (по крайней мере малым): будучи возмущенными, колебания вскоре восстанавливают свою исходную форму [1];
· являются нелинейными (т. е. описываются нелинейными дифференциальными уравнениями) и неконсервативными [2].
Автоколебательные системы самой различной природы чрезвычайно распространены. Они играют очень большую и важную роль в различных областях науки и техники: механике, автоматике, физики, химии, биологии, радиотехнике, электроники и др. Наиболее известными примерами механических автоколебательных систем являются часы и паровая машина, а также ламповые генераторы или генераторы на полупроводниковых приборах, лазеры, различного рода генераторы звука и т. д. Автоколебательными системами является сердце человека и животных [3], а также биоритмы живых организмов [7].
5. Характеристики ритма: период и частота
Автоколебательные системы могут демонстрировать ритмы самой разной формы, от простых, близких ксинусоиде, сигналов до последовательности коротких импульсов. Главной характеристикой таких систем является период Т , т. е. время одного колебания.
Часто бывает удобно характеризовать ритм числом колебаний в единицу времени или же частотой колебаний
f = ![]() . (1)
. (1)
При теоретическом анализе колебаний более удобной часто бывает угловая частота ω=2π f =2π/Т.
6. Подстройка ритмов: захват фаз и частот
Два неидентичных осцилляторов, которые, взятые по отдельности, имеют различные периоды, при наличии связи подстраивают свои ритмы и начинают демонстрировать колебания с общим периодом. Это явление часто и называют в терминах совпадения частот их захватом. Произойдет это или нет, т. е. синхронизуются ли они, зависит от двух факторов:
1. Сила связи. Этот параметр характеризует, насколько слабо или сильно взаимодействие;
2. Расстройка по частоте. Расстройка частот Δf =f 1 – f 2 характеризует, насколько различны осцилляторы. Представим себе следующий эксперимент. Пусть собственные частоты двух невзаимодействующих осцилляторов f 1 и f 2 . Свяжем осцилляторы и измерим частоты F 1 и F 2 связанных систем. Мы можем выполнить такие измерения для различных параметров расстройки и получить зависимость ΔF =F 1 –F 2 от Δf [1] (pис. 2).
Эта зависимость типична для взаимодействующих автоколебательных систем, независимо от их природы (механической, химической, электронной, и т. д.). Анализ показывает, что, если рассогласованность автономных систем не слишком велика, то частоты двух систем становятся равными, или захваченными , т. е. наступает синхронизация. В общем случае ширина области синхронизации возрастает с увеличением силы связи [3].
Рис. 2. График «разность наблюдаемых частот - расстройка» для некоторой фиксированной силы связи. Разность частот ΔF двух связанных осцилляторов изображена как функция расстройки Δf несвязанных систем. В определенном диапазоне расстроек частоты связанных осцилляторов идентичны (ΔF=0), что указывает на синхронизацию.
Более детальное рассмотрение синхронных состояний показывает, что синхронизация двух автоколебательных систем может возникнуть в двух формах. Чтобы описать эти режимы, введем ключевое понятие теории синхронизации, а именно понятие фазы осциллятора [1]. Фаза понимается как величина, пропорциональная доле периода и возрастающая на 2π в течение одного цикла колебаний. Фаза однозначно определяет положение периодического осциллятора. Как и время, она параметризует сигнал внутри одного цикла.
φ(t)=φo +2π![]() (2)
(2)
Рассмотрим разность фаз двух автоколебательных систем. Если в результате синхронизации разность фаз φ1 –φ2 близка к нулю, то такой режим называется синфазной синхронизацией . Если взглянуть на колебания осцилляторов с большой точностью, то можно выявить, что эти колебания не в точности совпадают, так что обычно говорят о фазовом сдвиге между двумя колебаниями. Этот фазовый сдвиг может быть очень мал, но он всегда присутствует, если две системы изначально имели разные периоды, или же разные частоты.
Если разность фаз синхронизованных осцилляторов близка к π , то говорят о синхронизации в противофазе .
Возникновение определенного соотношения между фазами двух синхронизованных автоколебательных систем часто называют захват фаз . Т. о. можно сформулировать основной признак синхронизации: будучи связанными, два осциллятора с изначально различными частотами и независимыми фазами подстраивают свои ритмы и начинают осциллировать на общей частоте [3]. Это также предполагает наличие определенного соотношения между фазами двух систем. Так, говорят, что фазы φ1 и φ2 захвачены в отношении n : m, если выполняется неравенство:
|nφ 1 – mφ 2 | < constant (3)
Подводя итоги, можно сказать, что если в каком-либо эксперименте мы наблюдаем две переменные, которые кажутся изменяющимися синхронно, то это не обязательно означает, что мы наблюдаем синхронизацию. Чтобы назвать явление синхронизацией, мы должны быть уверены в том, что:
·мы анализируем поведение автоколебательных систем,
т.е. систем, способных генерировать собственные ритмы;
·системы подстраивают свои ритмы за счет слабого взаимодействия;