Курсовая работа: Загальна характеристика датчиків
1. Визначення та класифікація датчиків
Датчиками називаються електронні прилади, які перетворюють параметр зовнішнього середовища у напругу, або струм, значення яких пов’язане з параметром зовнішнього середовища.
Класифікація датчиків можлива за двома ознаками:
1. По тому параметру зовнішнього середовища, яке перетворюється у напругу або струм. Відрізняють датчики тиску (А), сили (Б), положення (по координаті або по куту) (В), переміщення (по координаті або по куту) (Г), швидкості (лінійної або кутової) (Д), прискорення (лінійного або кутового) (Е), вібрації (Ж), близькості (З), температури (І), газового складу середовища (К), оборотів (Л), деформації (М), вологості (Н) тощо.
По тому фізичному принципу, за яким діє датчик. Відрізняють датчики ємнісні (ДА), п’єзоелектричні (ДБ), диференційно-трансформаторні (ДВ), термопарні (ДГ), тензорезистивні (ДД), потенціометричні (ДЕ), струмовіхрові (ДЖ), термісторні (ДІ), на ефекті Хола (ДК), п’єзорезистивні (ДЛ), оптоволоконні (ДМ), магніторезистивні (ДН), на поверхових акустичних хвилях (ДО), індукційні (ДП), на ефекті Віларі (ДР) тощо.
Датчик, що працює на будь-якому фізичному принципі може працювати як датчик різних параметрів зовнішнього середовища. У табл.1 наведені сучасні дані по використанню датчиків різних типів (знаком Х позначається переважне використання, знаком О – можливе використання, якщо знаку немає, то не використовується). До речі, багатьох типів датчиків, які розглядаються нижче, в таблиці нема.
Таблиця 1. Використання датчиків різних типів для перетворення різних параметрів зовнішнього середовища у електричний сигнал
| А | Б | В | Г | Д | Е | Ж | З | І | К | Л | М | Н | |
| ДА | Х | Х | О | Х | Х | О | Х | О | О | О | О | ||
| ДБ | О | О | О | Х | |||||||||
| ДВ | О | О | О | Х | О | О | О | Х | |||||
| ДГ | О | ||||||||||||
| ДД | Х | Х | О | О | |||||||||
| ДЕ | О | О | Х | О | |||||||||
| ДЖ | О | О | О | О | Х | О | |||||||
| IJ | О | ||||||||||||
| ДК | О | Х | О | Х | Х | ||||||||
| ДЛ | Х | Х | Х | Х | О | О | О | ||||||
| ДМ | О | О | О | Х | О | Х | Х | Х | О | О | О | О | О |
| ДН | О | О | Х | О | |||||||||
| ДО | О | О | О | О | О | ||||||||
| ДП | Х | О | Х | ||||||||||
| ДР | О | О | О | Х | Х |
Датчики механічних величин
Датчики положення або близькості
У якості таких датчиків можуть використовуватись датчики, побудовані на різних фізичних ефектах. У табл.2 наведене порівняння характеристик цих датчиків по різних параметрах.
Таблиця Порівняння характеристик датчиків положення або близкості
| Тип датчика | Індуктивний або диференційно-трансформаторний | Ємнісний | Ультразвуковий | Фотоелектричний |
| Параметр | ||||
| Відстань спрацювання | 100 мм | 50 мм | 12 м | 100-200 м |
| Максимальна температура середовища | 250°С | 70°С | 70°С | 300°С (з використанням світловодів |
| Максимальна частота спрацювання | 5 кГц | 10 Гц | 50 Гц | 1,5 кГц |
| Стійкість до зовнішнього впливу | Висока | Низька, чутливий до вологості та забруднення | Середня, чутливий до температури, тиску | Середня, чутливий до забруднення, конденсату |
Щодо простоти та стійкості до зовнішнього впливу найбільш привабливі індуктивні датчики. В найпростішому випадку індуктивний датчик складається з котушки з обмоткою, осердя з магнітом’якого заліза та магніта (рис.1).
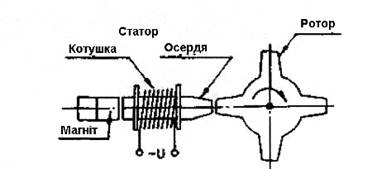
Рис.1. Конструкція індуктивного датчика
Ці три елементи складають статор датчика. Зі статором взаємодіє ротор у вигляді зубчатого диску або рейки з відповідною кількістю зубців. Коли один з зубців ротора наближається до обмотки, напруга у ній швидко наростає та при збіганні з середньою лінією обмотки, досягає максимуму, а потім при віддаленні зубця швидко міняє знак та збільшується у протилежному напрямку до максимуму. На графіку рис.2 виразно видна велика крутизна зміну напруги, тому цей перехід може бути використаний для керування електронними системами.
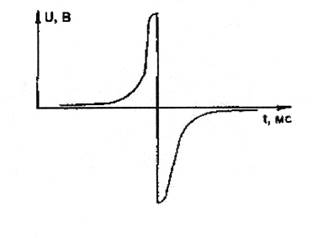
Рис. Вихідний сигнал індуктивного датчика.
Така конструкція датчика може використовуватись для підрахування кількості обертів валу двигуна, або іншого обертаючого приладу.
Коли потрібно реагувати на близькість сталевої (або взагалі металічної) деталі використовується індуктивний датчик, схема якого показана на рис.3.
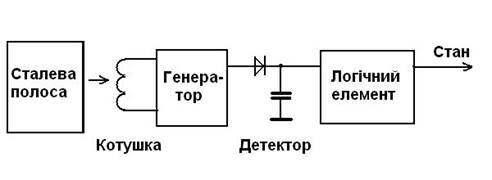
Рис.3. Індуктивний датчик, що реагує на близькість металевої деталі
Генератор, у склад якого входить котушка без осердя, побудований таким чином, що він не працює взагалі, якщо поблизу котушки нема металічного предмету. Тому на виході генератора напруга дорівнює нулю і на виході детектора теж. Якщо металічний предмет наближається до котушки, генератор починає генерувати високочастотні коливання, на виході детектору з’являється напруга і логічний елемент замість лог.”0” генерує на виході сигнал лог.”1”, сповіщаючи про наближення металевого предмету.
Такі датчики використовуються як пристрої, що сповіщають про закриття металевих дверей, люків, різних заслінок та кришок. Наприклад, на літаку „Boeing-747” налічується до 200 таких датчиків, виходи яких підключені до комп’ютера. Програма комп’ютера передбачає які саме двері та люки повинні бути закриті при злеті, при нормальному польоті, при посадці. Якщо є якісь відхилення, програма сповістить пілотів, або, наприклад, заборонить злет. Головним виробником таких датчиків є американська фірма Honeywell. Схожі характеристики мають датчики Хола. Американський вчений Герберт Едвін Хол у 1879 р. відкрив фізичний ефект, який пояснюється на рис.4.
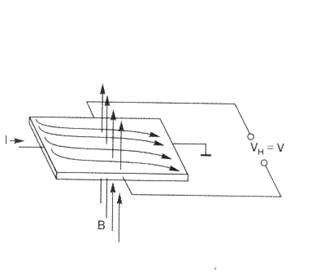
Рис.4. Фізичне трактування ефекту Хола
Якщо через пластину пропустити струм І та поперек цієї пластини пропустити магнітне поле з індукцією В, то на поперечних гранях пластини з’явиться напруга
Vн = RBIsinj/d,
де R – коефіцієнт Хола, який залежить від матеріалу пластини, В – магнітна індукція, І – струм, j - кут нахилу магнітної індукції до струму (він дорівнює 90°, якщо індукція поперечна до струму), d – товщина пластини.
Зараз знайдені матеріали, які мають досить великий коефіцієнт Хола. Датчик Хола можна також використати у ситуації рис.1 як пристрій для підрахування кількості обертів. Датчики Хола, що їх виготовляє компанія Honeywell поділяються на лінійні та цифрові. На рис.5 показана залежність вихідного сигналу від прикладеної до датчика напруги та магнітної індукції.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--