Курсовая работа: Загальна характеристика датчиків
Рис.26. Структура ємнісної системи
Під дією прискорення або удару пластини однієї групи зміщуються відносно другої групи, тому змінюється ємність конденсатора, яка потім перетворюється у електричний сигнал. Діапазон прискорень, наприклад для датчика ADXL202 складає ±2g.
Іншим прикладом є гіроскоп або датчик кутового прискорення. Принцип дії приладу показаний на рис.27.
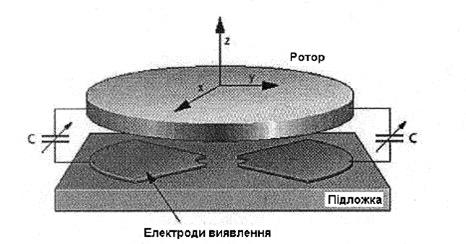
Рис.27. Структура гіроскопу
Під дією кутового прискорення або кутового переміщення ротор повертається відносно електродів виявлення, завдяки чому змінюється ємність системи. Ця ємність перетворюється у вихідну напругу, що пропорційна куту переміщення. У гіроскопа ADXRS300 цей кут досягає ±300°.
3. Датчики температури
Термічні резистори
Як відомо, опір металічних провідників залежить від температури відповідно до формули:
Rt = R0[1 + a(T2 – T1)],
де Rt – опір при температурі Т2,R0 – опір при температурі Т1, a - температурний коефіцієнт, що залежить від металу, який використовується, наприклад, для заліза a = +0,005; для платини a = 0,0038; для алюмінію a = 0,0038 тощо. Зараз, як правило, використовують платинові датчики, які на відміну від інших металів мають високу лінійність (у діапазоні температур від 0 до +100°С лінійність складає ±0,2%). Платинові датчики використовуються в широкому діапазоні температур – від -183 до +630°С. При більш низьких температурах використовують датчики з родію.
Термістори
Термістори – це нелінійні напівпровідникові резистори. Вони являють собою тонкий шар напівпровідника, що розміщується на оксидах міді, кобальту, нікелю, або інших металів. На відміну від термічних резисторів зміна опору таких резисторів дуже велика: від 4 до 6% на один градус Цельсію. Термістори бувають двох типів: негативні та позитивні. У перших опір зменшується при зростанні температури, у других – збільшується. Залежність опору від температури описується формулою:
Rt = R0 exp[b(1/T2 – 1/T1)],
де Rt – опір при температурі Т2, R0 – опір при температурі Т1, b - фактор, що залежить від матеріалу і виражається у градусах Кельвіна, він звичайно знаходиться між 1500°К та 7000°К. Для порівняння зміна опору від температури для термічних резисторів та термісторів показана на рис.28.
Термопари
Термоелектричні явища були відкриті Томасом Зеебеком у 1821 р. Якщо підігріти спай двох різних металів, то на кінцях їх виводів з’явиться напруга пропорційна зміні температури з коефіцієнтом, залежним від того, яка пара металів використовується (рис.29).
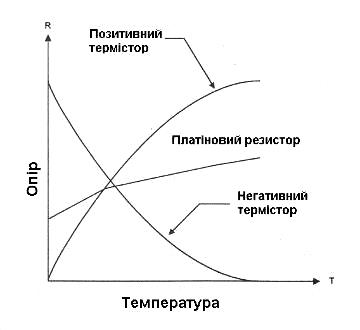
Рис.28. Зміна опору від температури для термічного резистора
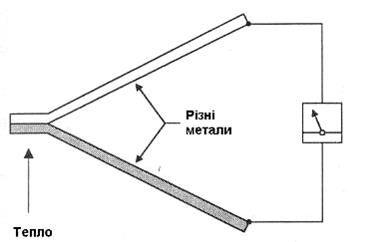
Рис.29. Схема ефекту Зеебека
Ці спаї в типовому випадку використовуються парами – гарячий спай та холодний спай, тому потенціал Зеебека пропорційний різниці температур між спаями. Холодний спай потрібно поміщати, наприклад, у холодну воду з температурою 0°С. Але в апаратурі частіше роблять штучний холодний спай, як це показано на рис.30.
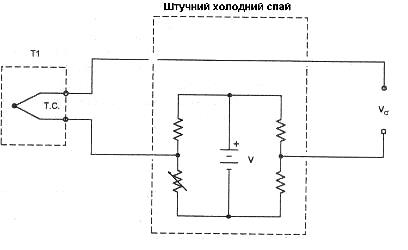
Рис.30. Схема зі штучним холодним спаєм
Замість холодного спаю вміщують схему, яка має такий самий потенціал Зеебека, як холодний спай.
Термопари частіше використовують для вимірювання високих температур, наприклад, 1500°С.
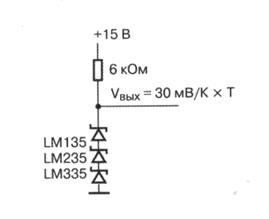
Мікросхемні датчики температури
Ці датчики являють собою стабілітрони, у яких напруга стабілізації залежить від температури з коефіцієнтом 10 мВ/°K. Еквівалентний стабілітрон має динамічний опір менший за 1 Ом і працює в діапазонах температур від -55 до +150°С. Для таких мікросхем, як LM135, LM235, LM335 похибка вимірювань складає менша за 1°С. Схема включення мікросхем такого типу показана на рис.31.