Курсовая работа: Загальна характеристика датчиків
На цьому ж принципі працює радіолокаційний датчик рівня.
Потенціометричний датчик рівня
По всій висоті контейнера встановлюється вертикальна нитка з високорезистивного сплаву. Через цю нитку пропускається струм, який її нагріває до досить високої температури. Але та частина нитки, що знаходиться у воді Rin, охолоджується, а та частина, що знаходиться на повітрі Rout– нагрівається. Сума опорів Rin + Routдає значення рівня – чим вище рівень, тим менша сума. Див. рис.20.
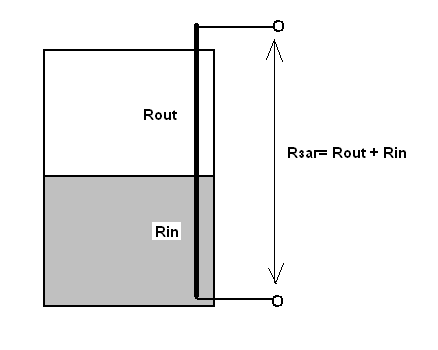
Рис.20. Потенціометричний датчик рівня.
Оптоелектронний датчик
В цьому датчику у полімерному корпусі міститься світло випромінюючий діод інфрачервоного діапазону та фотоприймач. Якщо датчик не контактує з рідиною, то інфрачервоне випромінювання повністю відбивається від границі полімер-повітря (рис.21).
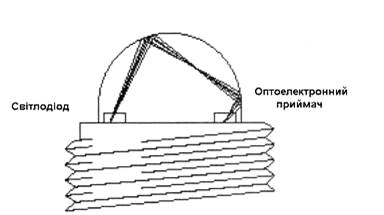
Рис.21. Оптоелектронний датчик рівня
Якщо датчик контактує з рідиною, то інфрачервоне випромінювання не приходить на оптоелектронний приймач і струм через цей приймач різко спадає. Такі датчики встановлюють в контейнерах з рідиною на різних рівнях. Для таких датчиків не важливо, яка рідина. Часто їх використовують в бензобаках.
Датчики кутових величин
Потенціометричний датчик кута нахилу
Цей датчик використовується, коли об’єкт, на якому він встановлюється, змінює своє положення у просторі (транспортний засіб, корабель тощо). На засобі встановлюється потенціометр, у якого є початок та кінець резистивної обмотки. Рухома частина потенціометру (повзунець) закріплений за допомогою тяги на вертикальному вантажі. Якщо нахил об’єкту змінюється, потенціометр змінює своє положення у просторі, а вантаж – ні. Тому відношення опорів плечей потенціометра R1/R2 залежить від куту нахилу, як це показано на рис.2
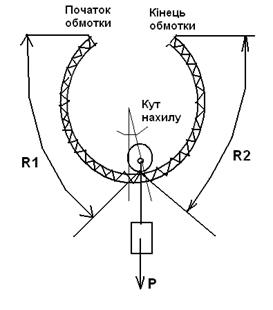
Рис.2 Потенціометричний датчик кута нахилу
Кодоперетворювач кута
Цей пристрій дозволяє перетворити кут повороту у цифровий код. Для цього треба створити кодову матрицю, яка показана на рис.23.
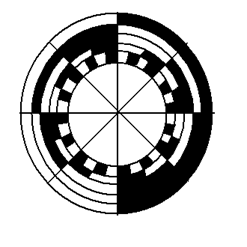
Рис.23. Кодова матриця для перетворення кута
Зовнішнє кільце матриці поділене на два сектори: перший 180° - світлий, другий від 180° до 360° - темний. Це самій старший розряд двійкового коду. Наступне кільце поділене на 4 частини по 90°: перша світла, друга темна, знову світла і знову темна. Це другий розряд двійкового коду. Трете кільце поділене на 8 частин по 45°, четверте – на 16 частин по 22,5°, п’яте – на 32 частини по 12,25° і т. і. Кожне наступне кільце має удвічі більше ділень, ніж попереднє. Кодову матрицю виготовляють на диску, який встановлюють на пристрої, що повертається. Диск освітлюється, а відбите світло попадає на фотодіоди ФД, кожен з котрих встановлений над відповідним сектором кодового диску, як це показане на рис.24.
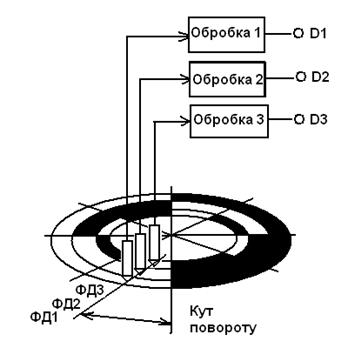
Рис.24. Обробка даних кодової матриці
Сигнали фотодіодів оброблюються у блоках обробки, де вони підсилюються та проходять через компаратори, в результаті чого визначаються розряди цифрового коду кута повороту.
Датчики прискорення та удару
Акселерометри за технологією MEMS
Технологія MEMS (MicroElectroMechanicalSystem – мікро електронно-механічні системи) дозволяє у корпусі мікросхеми розмістити як електронні, так і механічні системи. Завдяки цьому можна механічні переміщення елементів мікросхеми перетворювати у електричні сигнали, зокрема цифрові. Типова структура такого датчика показана на рис.25.
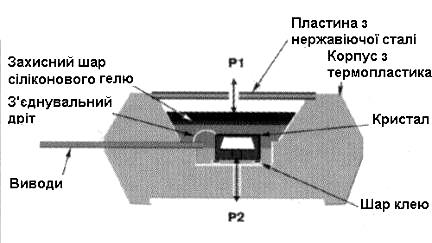
Рис.25. Структура датчика MEMS
У якості кристалу може бути ємнісна, п’єзоелектрична, оптична, ферроелектрична система, що реагує на прискорення або удар. На рис.26 показана структура ємнісної системи, пластини якої мають товщину 20 мікронів.