Реферат: Автомобильные датчики и интеллектуальные транспортные системы
Введение
Студент группы 11А/07 Романов С.И., далее автор сразу извиняется за немного нестандартный и мягко сказать оригинальный способ изложения материала реферата. Автор не скрывает факт использования Internet и статей, в нём опубликованных, правила копирайта при этом были соблюдены.
И так тема реферата «автомобильные датчики» наверняка каждому связанному с техникой на ум приходит конструкция датчика уровня топлива, температуры и давления масла, да, да всех тех приборчиков, которые автор ещё в первом классе школы разбирал подручными средствами, с целью узнать As it works. Так вот, это было первое и последнее упоминание, про подобные датчики. Реферат не про них. А про что? Реферат посвящен Интеллектуальным Транспортным Системам (ITS — Intelligent Transportation Systems).Подобные разработки разрушают сложившееся представление о том, что создание полноценного автомобиля-робота теоретически невозможно, поскольку эта задача относится к классу AI-complete («совершенный искусственный интеллект»), то есть может быть решена, только если робот будет обладать интеллектом человека во всей его полноте. В случае, если интеллект робота уступает человеческому, всегда может возникнуть какая-то нештатная ситуация, в которой он окажется бессилен. С этой точкой зрения можно было бы согласиться, если бы не реальный интеллектуальный уровень многих современных водителей, и если не знать реальную ситуацию на дорогах— во всяком случае, на отечественных дорогах. Не вызывает сомнения, что если бы живые водители были столь же дисциплинированны, как и роботы, и не употребляли алкоголь и наркотики, а неизбежные несчастные случаи являлись бы только следствием нештатных ситуаций, оказавшимся роботам не под силу, то жертв на дорогах стало бы на порядки меньше. Почтидесятьлетиздаетсямеждународныйжурнал IEEE Transactions on Intelligent Transportation Systems. Увы, в России, как это обычно бывает, термин «интеллектуальные транспортные системы» используется как-то по-особому однобоко. В основном его относят к практическим приемам организации транспортных потоков, учету передвижения транспортных средств и навигации, а о теоретических исследованиях и серьезных публикациях на тему ITS на русском языке автору ничего неизвестно.
Инициатива ITS стала возможной потому, что современный автомобиль активно роботизируется изнутри и сегодня оснащен целым рядом систем автоматизации. Помимо уже вошедших в обиход автоматических коробок передач, систем автоматической блокировки торможения и систем управления другими агрегатами плюс обычного круиз-контроля, существуют: система информирования о состоянии дорожного покрытия, особенно об оледенении; система адаптивного круиз-контроля, воспринимающая данные от систем обнаружения соседних автомобилей; система взаимного информирования автомобилей, снабженных системами GPS; средства слежения за дорожной разметкой; системы автоматизированной парковки; устройства для просмотра мертвых зон; системы контроля скорости на поворотах.
Но это общие рассуждения уставшего водителя, а пока ITS получившая значительное распространение во всем мире, все же исходит из действующей парадигмы «за рулем водитель». Логичным продолжением этого направления стали системы Internet для автомобилей. Каким бы совершенным ни был робот, он эффективнее работает во взаимодействии с себе подобными. В системах могут использоваться совместно действующие объекты, образующие то, что теперь называют «разумным роем»
Подобную систему Extended Floating Car Data-System (XFCD) представила компания BMW.
Испытание проводилось на специальной тестовой трассе в SBC Park и было призвано продемонстрировать возможности системы. Например, автомобиль попадает на скользкую дорогу. За считанные секунды система обрабатывает информацию и предупреждает в режиме реального времени следующий за ним автомобиль. Та же информация в то же самое время передается стационарным службам движения, которые статистически обрабатывают поступающие данные и рассылают их обратно другим участникам движения.
Система определения дорожной ситуации XFCD станет в будущем усовершенствованным последователем существующей системы Floating Car Data, что переводится как "данные с движущегося автомобиля". Уже сегодня с помощью FCD автомобили посылают свои данные о местонахождении в определенный момент времени на центральный пульт движения, который сопоставляет получаемые сообщения с сообщениями других автомобилей, оснащенных FCD, с целью распознавания дорожных и внештатных ситуаций. Система XFCD способна сама распознавать дорожную ситуацию, анализировать все имеющиеся данные в автомобиле и передавать обработанные данные на центральный пульт движения. Параллельно система способна через систему-коммуникатор "Авто-Авто" предупреждать другие автомобили в зоне действия передатчика.
Как говорится всё гениальное просто, для разработанной автомобильной новинки не требуется установки никаких дополнительных аппаратов. XFCD функционирует на базе имеющейся навигационной системы, и ее ввод в эксплуатацию заключается лишь в загрузке программы. Введение бортовой сети позволяет синхронно задействовать целый спектр возможностей. В устроенном таким образом современном автомобиле система получает доступ и совмещение с множеством других инфо-блоков управления. Это ближний и дальний свет, противотуманное освещение, термометр внешней среды и кондиционер, тормоза и навигационная система, сенсор дождя и омыватель стекла, а также прочие не менее важные мелочи. Все эти механизмы функционируют в зависимости от дорожной ситуации. Так, на понижение температуры окружающей среды, лед или даже неожиданное появление масла на участке дороги автомобиль тут же отреагирует регулированием системы стабилизационного контроля (DSC) и скорости движения.
Еще одно неоспоримое преимущество системы XFCD заключается в возможности передачи сообщений напрямую другим автомобилям. Информация передается посредством Ad-hoc-сети всем автомобилям в ближайших окрестностях. Каждый автомобиль, в зависимости от ситуации, выполняет роль или отправителя, или получателя, или передатчика. Преимущество зарекомендовавшей себя технологии Multi-Hopping неоспоримо: Ad-hoc-сеть организуется автономно, обладает необходимой дальностью радиуса действия и не требует создания специальной инфраструктуры.
Система XFCD создана BMW Group в рамках концепта BMW ConnectedDrive. Основополагающая идея концепта – связывание воедино трех информаторов автомобильного движения "водитель - автомобиль - внешняя среда" посредством телекоммуникационных, онлайн и автомобильных вспомогательных систем ради безопасности движения.
Теперь понятно, что ключевой системой беспилотного автомобиля робота и ITS является интегрированная система, которая является бортовым компьютером, параметров движения и навигационной системой одновременно, постоянно связанным с себе подобными. Именно про датчики такого бортового компьютера пойдет далее речь.
А вообще вы уважаемый читатель можете с ходу объяснить что такое, и как работает«GPS навигация»? Сейчас разберёмся!
Навигационная система автомобиля.
Интегрированная навигационная система решает следующие задачи:
1. непрерывное определение координат в районах высотной городской застройки, в тоннелях, под мостами и путепроводами;
2. более точное счисление координат по сравнению с GPS, за счёт дополнительного оборудования;
3. счисление координат и курса транспортного средства без запаздывания;
Что такое GPS?
| GPS - это аббревиатура от английского названия Global Positioning System, что означает "система глобального позиционирования", или, в более правильном техническом переводе, - "глобальная система определения координат". Основные ее взаимодействующие элементы - это 24 космических спутника NavStar (запущены и принадлежат США) и миллионы приемников на поверхности Земли. |
 Работает система так: приемник ловит сигнал от 3 и более спутников, замеряет время задержки прохождения сигнала от каждого из них и автоматически рассчитывает свое местоположение - географические координаты: широту, долготу, а также высоту над уровнем моря. Эти данные процессор устройства соотносит с электронной картой, загруженной в память прибора. Благодаря этому пользователь видит на дисплее изображение географической карты, на которой показывается и двигается "точка" - это он сам со своим GPS-приемником.
Работает система так: приемник ловит сигнал от 3 и более спутников, замеряет время задержки прохождения сигнала от каждого из них и автоматически рассчитывает свое местоположение - географические координаты: широту, долготу, а также высоту над уровнем моря. Эти данные процессор устройства соотносит с электронной картой, загруженной в память прибора. Благодаря этому пользователь видит на дисплее изображение географической карты, на которой показывается и двигается "точка" - это он сам со своим GPS-приемником.
В основе работы системы GPS лежит принцип спутниковой трилатерации. Согласно этому принципу, координаты объекта на поверхности Земли могут быть вычислены по измерениям расстояний до спутников. Поскольку положение КА в пространстве известно и расчетные значения параметров своих орбит спутники передают вместе с дальномерным кодом, то для объекта на поверхности Земли спутники являются пунктами с известными в любой момент времени координатами.
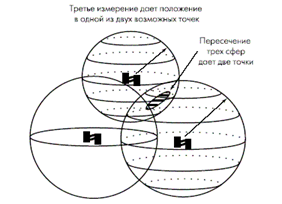
Если расстояние от одного спутника известно, тогда можно описать сферу заданного радиуса вокруг него. Например, если до спутника 22 000 километров, то мы находимся где-то на воображаемой сфере радиусом 22 000 километров. Если известно расстояние до двух спутников , то искомая точка местоположения будет находится на окружности, представляющей собой пересечение двух сфер. Следовательно, круг нашего поиска существенно сузился. Получив сигнал от третьего спутника, мы получаем третью сферу, пересечение которой с окружностью дает две точки. Остается только выбрать правильную точку. Обычно одна из точек - это неправдоподобное решение, т.к. она находится или внутри Земли, или слишком высоко над поверхностью, или движется слишком быстро. Вычислители GPS-приемников снабжены различными устройствами, автоматически определяющими истинное местоположение из двух возможных.
Таким образом, получив сигнал как минимум от трех спутников, мы можем вычислить координаты любой точки вблизи поверхности Земли. Чтобы проводить столь качественные вычисления, необходимо пользоваться очень точными часами, ведь расхождение во времени всего в 1 тысячную долю секунды даст ошибку местоположения около 300 км. На борту спутников установлены атомные часы. Каждый спутник имеет их в количестве 4, чтобы можно было гарантировать, что хотя бы одни работают обязательно. Способ измерения времени основан на атомном стандарте частоты, который обеспечивает ход бортовых часов спутника с наносекундной точностью. А это 0,000000001 секунды!
Большинство GPS-навигаторов способны принять сигнал одновременно от 12 спутников. Этого более чем достаточно для решения большинства задач. Однако в настоящее время в продаже появились 14- и даже 18-канальные приемники. Но одновременно принять сигнал даже от 12 спутников очень сложно. Для этого необходимо находиться на открытом месте, причем само спутниковое созвездие (то есть положение спутников на небосклоне) должно быть благоприятно. Принять же сигнал сразу от 18 спутников в настоящее время просто невозможно, так как часть из них скрыта и находится по другую сторону земного шара.
Система GPS содержит в себе три фундаментальных составляющих.
1. Космический сегмент представляет собой 24 спутника, находящихся на 6 различных круговых орбитах, которые расположены под углом 60 градусов друг к другу. Спутники движутся по орбитам радиусом 22 200 километров со скоростью 11 тысяч километров в час и совершают один оборот вокруг Земли за период, приблизительно равный 12 часам. Все они ежедневно повторяют свою траекторию с "опозданием" в 4 минуты.
Вес каждого спутника около 900 кг, размер более 5 м, включая солнечные батареи. На каждом спутнике установлены атомные часы, обеспечивающие высокую точность (10-9 сек), вычислительно кодирующее устройство и передатчики мощностью 50 Вт и 8 Вт, излучающие на частотах L1 = 1575,42 МГц и L2 = 1227,60 МГц.
В идеале в любой момент времени любая точка Земного шара находится в зоне видимости не менее трех спутников. Спутники можно "увидеть" даже на полюсах, правда они будут находиться низко над горизонтом, что влияет на точность измерений, но несущественно.
Справедливости ради стоит отметить, что есть все же "темные" области в высоких широтах, где одновременно может быть не более 2 спутников, что не позволяет определять координаты и нарушает работу приемника GPS. Однако такое положение дел длится лишь от 15 до 45 минут, в остальном система навигации GPS действительно глобальна.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--