Реферат: Автомобильные датчики и интеллектуальные транспортные системы
Станции слежения непрерывно контролируют движение космических аппаратов и передают данные в центр управления. В центре вычисляют уточненные элементы спутниковых орбит и коэффициенты поправок шкал времени. Эти данные поступают по каналам станций связи на спутники не реже, чем один раз в сутки.
3. GPS-приемник - третий сегмент системы навигации, который позиционируется и позволяет вычислять географические координаты на основе полученных данных.
Но, к сожалению, несмотря на все высокие технологии, примененные в GPS погрешности этой системы также глобальны и не могут быть использованы компьютером как основные данные для автоводителяя. Сам навигатор, по заявлениям производителей, определяет местоположение с точностью до 3-5 м. Однако очень многое тут зависит от числа спутников, которые "видят" прибор и, опять-таки, от электронных карт. Дело в том, что в России для гражданского использования разрешены карты масштабом не крупнее чем 1:1000, т. е. в 1 см карты - 1 км местности. На практике же это значит, что 100 м будут умещаться в 1 мм на экране.
Автомобиль видящий и коммуницирующий

Перечисленные выше уже созданные элементы автоматизации снимают технические проблемы управления агрегатами автомобиля. Остаются проблемы ориентации и взаимодействия с внешней средой. Для ориентации в пространстве могут использоваться разнообразные устройства, например, инфракрасные датчики, действующие на предельно близком расстоянии. Эти устройства хорошо известны. Менее известен так называемый «ладар», который иногда еще именуют «лидаром» от английского названия Light-Imaging Detection and Ranging. Сначала он использовался как прибор для измерения атмосферных характеристик дистанционным способом лазерного зондирования. Позже усилиями компании SICK ладар стал составной частью системы измерения дистанции (Laser Measurement Sensor, LMS). Идея ладара не оригинальна: LMS излучает несколько лучей и воспринимает отраженные данные. Лазеры монтируются в головке, вращающейся со скоростью несколько сотен оборотов в минуту. Наибольшая сложность заключается в том, что при движении по земле на коротких расстояниях с большой скоростью возникают большие угловые перемещения. Поэтому, несмотря на использование различного рода систем стабилизации и сложных подвесов, для обработки изображений в режиме реального времени требуется применение серьезной вычислительной мощности и соответствующего программного обеспечения. О масштабе решаемых задач можно судить по тому, например, что сканирующий ладар Velodyne’s HDL-64E генерирует данные по 2,5 млн. точек в секунду и передает их в виде пакетов данных, используя Fast Ethernet.
Обладая в полной мере свойствами инерциальной навигационной системы с полным набором датчиков ориентации и перемещения (см рисунок), интегрированная система способна определять все параметры движения транспортного средства: угловые скорости, ускорения, ударные и вибрационные воздействия, перегрузки.
При этом в отличие от традиционных блоков датчиков движения в интегрированной системе реализован сложный математический аппарат пересчета воздействий в различные системы координат. Поэтому потребитель может использовать выходную информацию системы непосредственно для своих приложений без предварительной обработки.
Гироскопы для автомобильных навигационных систем
Как уже говорилось, все чаще в автомобили устанавливаются навигационные системы, предназначенные для ориентации в незнакомой водителю местности, поиска оптимального маршрута и т.д. Подавляющее большинство таких систем основано на системе глобального спутникового позиционирования (GPS). Однако такая система имеет существенный недостаток невозможность работы в зоне неуверенного приема сигнала со спутников, в условиях мегаполиса, в тоннелях, подземных гаражах и т.д. Иногда оказывается, что точность определения и отслеживания координат с использованием GPS недостаточна для работы системы в целом.
В этом случае на выручку GPS приходят различные дополнительные датчики, например гироскопические датчики, которые позволяют отследить скорость и направление перемещения автомобиля без участия спутниковых систем.
Компания Murata, активно занимающаяся вопросами разработок, представила на рынок новый гироскоп серии MEV-50A-R.
Принцип действия датчика основан на возникновении силы Кориолиса при повороте качающегося маятника вокруг оси качения. При этом возникает сила Кориолиса, перпендикулярная плоскости качения маятника. Датчик состоит из так называемой биморфной пластины. Биморфная пластина представляет собой две керамические пластины с разной поляризацией, соединенные вместе. На одну из пластин биморфа подается высокочастотное напряжение, под действием которого весь биморф приводится в колебательное движение. При этом со второй пластины снимается напряжение, которое возникает при ее колебании, вызванном колебаниями первой пластины. При повороте пластин вокруг своей оси возникает сила Кориолиса, которая изменяет характер колебаний керамических пластин и, соответственно, приводит к изменению напряжения, снимаемого со второй пластины. Далее, этот сигнал обрабатывается и на выходе гироскопического датчика получается напряжение, которое прямо пропорционально скорости поворота датчика вокруг рабочей оси. Эта техника измерения позволяет добиться пониженного значения шумов, по сравнению с существующими методиками, применяемыми в акселерометрах. В будущем компания Murata планирует добавить в гироскопы цифровую схему температурной компенсации. Для включения гироскопа в электрическую схему потребуется минимум внешних компонентов: 5В регулятор напряжения, АЦП (встроен в большинство современных микроконтроллеров), фильтрующий конденсатор и два резистора.
Радар
Второй датчик подразумевает использование радара, который работает по эффекту Доплера: устройство высылает радиоимпульсы, они отражаются от объекта и "летят" обратно. Затем компьютер вычисляет моментальную скорость объекта, к сожалению, с некоторой погрешностью. Согласно Закону об измерениях, при измерении скорости до 100 км/ч возможная погрешность составляет до 5 км/ч. Если же скорость объекта больше 100 км/ч, то погрешность измерений может составлять до 3 процентов.
Автор считает, что не стоит подробнее излагать возможные конструкции радаров, надеясь, что всем про это известно, тем более что следующий датчик схож по принципу действия, имеет более высокую точность и относительно недавно изобретён.
Ладар и лидар, два названия одного прибора.
Скорость можно также замерить ладаром, принцип работы которого похож на устройство обыкновенного лазерного дальномера. Для своих вычислений ладар берет за основу два местонахождения объекта и время, за которое он преодолел расстояние между ними. Далее компьютер делит расстояние на время и получает моментальную скорость. Стоит отметить, что если с радаром прицеливать не обязательно, то ладар необходимо направлять исключительно на номерной знак автомобиля, поскольку он является лучшим отражающим элементом на автомобиле.
LIDAR (англ. Light Detection and Ranging, лида́р) — технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления отражения света и его рассеивания в прозрачных и полупрозрачных средах.
Лидар как прибор представляет собой, как минимум, активный дальномер оптического диапазона. Сканирующие лидары в системах машинного зрения формируют двумерную или трёхмерную картину окружающего пространства. Устоявшийся перевод LIDAR как «лазерный радар» не вполне корректен, так как в системах ближнего радиуса действия (например, предназначенных для работы в помещениях), главные свойства лазера: когерентность, высокая плотность и мгновенная мощность излучения — не востребованы, излучателями света в таких системах могут служить обычные светодиоды.
История создания.
В первой половине 1960-х годов, начались опыты по применению лидара с лазерным излучателями для исследования атмосферы.
В 1969 году лазерный дальномер и мишень, установленная на Аполлоне-11, применялся для измерения расстояния от Земли до Луны. Четыре мишени, доставленные на Луну тремя «Аполлонами» и «Луноходом-2», и по сей день используются для наблюдения за орбитой Луны.
В течение 70-х годов, с одной стороны, отлаживалась технология лазерных дальномеров и компактных полупроводниковых лазеров, а с другой — были начаты исследования рассеяния лазерного луча в атмосфере. К началу 80-х годов эти исследования стали настолько известными в академических кругах США, что аббревиатура LIDAR стала именем нарицательным — lidar, что зафиксировал словарь Уэбстера 1985 года. В те же годы лазерные дальномеры достигли стадии зрелой технологии (по крайней мере, в военных приложениях) и выделились в отдельную от лидаров отрасль техники.
Принцип действия
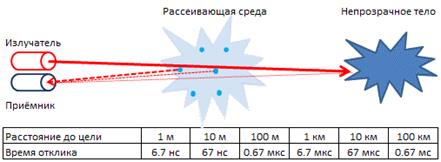
Принцип действия лидара не имеет больших отличий от радара: направленный луч источника излучения отражается от целей, возвращается к источнику и улавливается высокочувствительным приёмником (в случае лидара — светочувствительным полупроводниковым прибором); время отклика обратно пропорционально расстоянию до цели. В отличие от радиоволн, эффективно отражающихся только от достаточно крупных металлических целей, световые волны подвержены рассеиванию в любых средах, в том числе в воздухе, поэтому возможно не только определять расстояние до непрозрачных (отражающих свет) дискретных целей, но и фиксировать интенсивность рассеивания света в прозрачных средах. Возвращающийся отражённый сигнал проходит через ту же рассеивающую среду, что и луч от источника, подвергается вторичному рассеиванию, поэтому восстановление действительных параметров распределённой оптической среды — достаточно сложная задача, решаемая как аналитическими, так и эвристическими методами. В устройствах ближнего радиуса действия вместо коротких импульсов может использоваться непрерывная амплитудная модуляция излучения переменным напряжением с частотой в единицы мегагерц.
Инфракрасный датчик движения
Датчик, обнаруживающий перемещение каких-либо объектов.
Принцип работы основан на отслеживании уровня ИК - излучения в поле зрения датчика (как правило, пироэлектрического). Сигнал на выходе датчика монотонно зависит от уровня ИК излучения, усредненного по полю зрения датчика. При появлении человека (или другого массивного объекта с температурой большей, чем температура фона) на выходе пироэлектрического датчика повышается напряжение. Этот скачёк и является сигналом для включения нагрузки датчика движения. Датчик обнаруживает только изменения ИК фона, то есть неподвижный объект не будет обнаружен.