Реферат: Электропривод механизма передвижения
По надежности электроснабжения этот привод можно отнести к "особой группе" первой категории.
1.2 Электроприводом называется электромеханическое устройство, предназначенное для электрификации и автоматизации рабочих процессов и состоящее из преобразовательного, электродвигательного, передаточного и управляющего механизмов. В отдельных случаях преобразовательный и передаточный механизмы могут отсутствовать.
Достоинствами электропривода являются: возможность простого и экономичного преобразования электрической энергии в механическую;
Возможность изготовления двигателя любой необходимой мощности, что позволяет использовать индивидуальный привод отдельных рабочих механизмов машины; высокая управляемость привода, его надежность; упрощенная конструкция рабочей машины, малые габариты и масса привода; широкий диапазон и плавность регулирования скорости и т.п.
Наиболее часто применяемым типом электродвигателя является асинхронная машина с фазным ротором, т.к. обеспечивает достаточное регулирование ускорения. Асинхронные же двигатели с короткозамкнутым ротором не находят широкого применения из-за чрезмерно больших ускорений и пусковых токов, что не всегда приемлемо при переносе краном таких грузов, как жидкий металл, шлак и т.д.
Применение привода постоянного тока нежелательно, т.к. он имеет пониженную надежность из-за износа коллекторного узла и его быстрого выхода из строя, особенно это касается условий его работы при загрязненности атмосферы цеха.
Исходя из всего перечисленного, выбираем в качестве основы привода асинхронную машину с фазным ротором.
Питание двигателя привода тележки будет осуществляться через гибкие троллеи, т.к. тележка имеет диапазон передвижения по направляющим 28 метров и применение жестких троллей не оправдано.
2. Специальная часть.
2.1 Схема управления должна отвечать всем требованиям, заданным в п.1.1. Наиболее распространенной схемой является схема, построенная на основе командоконтроллера. Она имеет высокую ремонтопригодность, дешевую элементную базу и большую надежность.
Контроль нулевого положения командоконтроллера SA осуществляет реле KS, контакт которого подает питание на схему управления.
В первом положении "Вперед" включаются контакторы KM1 и KM2, которые подключают статор двигателя к сети. Блок-контакт КM2 включает реле K, которое включает контактор тормозного электромагнита KM3. При этом двигатель растормаживается и идет в ход при полностью включенном в цепь ротора реостате (кривая 1 на рисунке 1).
В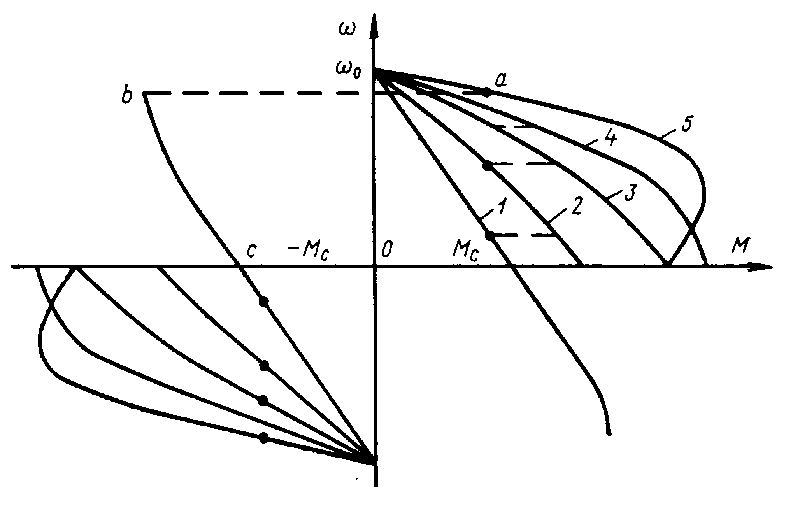
о втором положении контроллера включается контактор KM4 (см. графическую работу, лист 1), который шунтирует предварительную ступень пускового реостата (двигатель работает на характеристике 2, рисунок 1).
Рисунок 1 - Механические характеристики кранового электродвигателя.
Машинист может установить ручку командоконтроллера сразу в крайнее правое положение. Разгон будет осуществляться автоматически, в функции времени, с помощью реле KAT1 - KAT3 (см. графическую работу, лист 1). Блок-контакт KM4 разомкнет цепь катушки первого ускоряющего реле KAT1, и последнее с выдержкой времени включит первый ускоряющий контактор KM5. Аналогично с помощью реле KAT2 и KATЗ включаются ускоряющие контакторы соответственно KM6 и KM7.
Для питания катушек реле времени служит выпрямитель; контактор KM6, включившись, своим блок-контактом, отключит от сети выпрямитель, а вместе с ним и катушку реле KATЗ. Двигатель будет работать на характеристиках 3, 4, 5 (см. рисунок 1).
В цепи ротора всегда остается невыключенной часть реостата. Этим смягчается механическая характеристика (кривая 5 на рисунке 1), благодаря чему массы двигателя и крана в большей степени помогают двигателю преодолевать пиковые перегрузки.
Как отмечалось, электропривод может работать в двигательном режиме и в режиме торможения противовключением. Если при движении крана «Вперед» рукоятку командоконтроллера SA (см. графическую работу, лист 1) перевести в любое положение «Назад», контактор KM1 отключит двигатель от сети, а затем включится контактор KM8 и реле KCC. Контакторы ускорения KM5—KM7, KM4 отключаются, и в цепь ротора будет введен весь реостат. В момент перехода командоконтроллера SA через нулевое положение кратковременно отключится реле K, контакт которого шунтирует добавочный резистор R1 в цепи реле KCC. Этим осуществляется форсировка включения реле KCC. Если рукоятка SA была переведена в первое положение «Назад», то после окончания процесса торможения кран останавливается. Если рукоятка была установлена во 2, 3 или 4-е положения, то после снижения скорости до 10% от номинальной отключается реле KCC, которое своим контактом подключает цепь питания ускоряющих контакторов, и начинается автоматический разгон двигателя в направлении «Назад».
Торможение осуществляется по линии abc (см. рис. 1): по линии аb — переход двигателя в режим торможения противо-включением и по линии ba — его замедление и остановка.
Контакты конечных выключателей SQ1, SQ2, размыкающиеся в предельно крайних положениях, и контакт максимального реле KA включены в цепь реле KS (см. графическую работу, лист 1). Максимальное реле состоит из трех катушек с подвижным якорем, воздействующих на один общий контакт.
Как отмечалось, аппаратура управления и тормозные электрод-магниты постоянного тока отличаются сравнительно высокой износостойкостью, долговечностью, надежностью, большой допустимой частотой включения и т. п. Поэтому для кранов, работающих в режимах Т и ВТ, используются магнитные контроллеры типов К, КС ДК.
2.2 Построение нагрузочной диаграммы механизма.
2.2.1 Определяем передаточное число редуктора привода тележки:
(1)
где R - радиус колеса тележки, м;
n - частота вращения вала приводного двигателя, об/мин;
V - заданная скорость тележки, м/мин;