Реферат: Геометрический способ сложения сходящихся сил
Задача 1.2.3
Два невесомых стержня АС и ВС соединены в точке С и шарнирно прикреплены к полу. К шарниру С подвешен груз 1 (рис.1.26). Определить реакцию стержня ВС , если усилие в стержне АС равно 43Н, углы a =60°, b =30°. (Ответ: - 24,8 Н).
Задача 1.2.4
Однородный шар весом 40 Н опирается на две плоскости, пересекающиеся под углом a =60° (рис.1.27). Определить давление шара на наклонную плоскость. (Ответ: 46,2 Н).
Задача 1.2.5
Три стержня AD,BD,CD соединены в точке D шарнирно (рис.1.28). Определить усилие в стержне CD , если сила F =8H находится в плоскости Oyz и угол a =20°. (Ответ: 0).
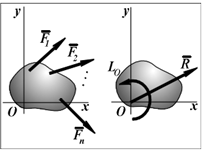
Равновесие тела под действием плоской системы сил.
Для равновесия твердого тела, находящегося под действием плоской системы сил, необходимо и достаточно, чтобы главный вектор этой системы сил и ее алгебраический главный момент были равны нулю, то есть R = 0, LO = 0, где О - любой центр, расположенный в плоскости действия сил системы.
Вытекающие отсюда аналитические условия равновесия (уравнения равновесия ) плоской системы сил можно сформулировать в следующих трех формах:
Основная форма уравнений равновесия:
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из координатных осей и сумма их алгебраических моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю:
![]() Fix = 0;
Fix = 0; ![]() Fiy = 0;
Fiy = 0; ![]() MO (F i ) = 0. (I)
MO (F i ) = 0. (I)
Вторая форма уравнений равновесия:
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов всех сил относительно двух центров А и В и сумма их проекций на ось Ox, не перпендикулярную оси Ox , были равны нулю:
![]() Fix = 0;
Fix = 0; ![]() MА (F i ) = 0;
MА (F i ) = 0; ![]() MВ (F i ) = 0. (II)
MВ (F i ) = 0. (II)
Третья форма уравнений равновесия (уравнения трех моментов ):
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов всех сил относительно любых трех центров А, В и С, не лежащих на одной прямой , были равны нулю:
![]() MА (F i ) = 0;
MА (F i ) = 0; ![]() MВ (F i ) = 0;
MВ (F i ) = 0; ![]() MС (F i ) = 0. (III)
MС (F i ) = 0. (III)
Уравнения равновесия в форме (I) считаются основными , так как при их использовании нет никаких ограничений на выбор координатных осей и центра моментов.
С использованием понятия бивектора плоской системы сил условия равновесия в форме (I) могут быть сформулированы следующим образом:
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы бивектор этой системы сил был равен нулю: Wc = ![]() W (F i ) = 0.
W (F i ) = 0.
На этом основании развит матричный метод составления уравнений равновесия плоской системы сил, ориентированный на применение компьютерных систем математических вычислений.
Во всех вышеизложенных формах условия равновесия плоской системы сил выражаются тремя уравнениями.
Задачи статики, в которых число скалярных неизвестных (обычно они представляют собой неизвестные реакции связей) равно числу уравнений равновесия, содержащих эти неизвестные, называются статически определимыми . В этом случае и саму конструкцию (одно твердое тело или систему тел) также называют статически определимой .
Задачи же (а также рассматриваемые конструкции), для которых число неизвестных больше числа уравнений равновесия, называют статически неопределимыми . Такие задачи не могут быть решены с использованием только уравнений равновесия.
Таким образом, чтобы задача статики на равновесие тела под действием произвольной плоской системы сил являлась статически определимой, число неизвестных должно быть равно трем.
Рассмотрим теперь частные случаи плоских систем сил, для которых условия равновесия выражаются двумя уравнениями.
Плоская система параллельных сил.