Реферат: Гирокомпас Вега
Одной из характерных черт развития современного морского флота является повышение скорости судов.Это поставило перед навигационным оборудованием сложную задачу — обеспечить безопасность мореплавания судов такого типа. В решении этой задачи важное место занимает создание гирокомпасов, которые могли бы при высокой скорости, а следовательно, и лучшей маневренности судов, вырабатывать истинный курс с высокой точностью. Этому требованию в большой степени отвечают гирокурсоуказатели с электромагнитным управлением.
Основное отличие гирокомпасов с электромагнитным управлением от ранее известных типов заключается в том, что в них в качестве чувствительного элемента (ЧЭ) используется астатический гироскоп, а для придания ему компасных свойств применяются датчики моментов, действующих по осям прецессии гироскопа в зависимости от угла отклонения его главной оси от плоскости горизонта.
Угол отклонения главной оси гироскопа измеряется физическим маятником, установленным на камере гироскопа, но не накладывающим моментов на гироскоп. Такой маятник (его лучше называть индикатором горизонта) вырабатывает электрический сигнал, пропорциональный углу отклонения главной оси гироскопа от плоскости горизонта. После соответствующего преобразования этот сигнал используется для возбуждения датчиков момента.
В обычных гирокомпасах измерение угла отклонения главной оси гироскопа от плоскости горизонта и наложение управляющих моментов на гироскоп выполняются одним элементом — физическим маятником, жестко связанным с гироскопом или гироскопическим ЧЭ — гиросферой. Если понимать под методом управления гироскопом способ наложения управляющих моментов, то в отличие от классических гирокомпасов с непосредственным управлением от физического маятника схему нового гирокомпаса, у которого физический маятник играет роль только индикатора горизонта, часто называют гирокомпасом с косвенным управлением. В этом гирокомпасе ЧЭ — трехстепенной поплавковый гироскоп, связь которого с Землей осуществляется посредством индикатора горизонта, а наложение управляющих моментов на гироскоп производится через торсионы при помощи следящих приводов. В зависимости от характера управляющих моментов курсоуказатель может работать в двух режимах: гирокомпаса и гироазимута — гироскопа направления.
ТТХ гирокомпаса «Вега»
«Вега» является двухрежимным корректируемым гироскопическим курсоуказателем (ГКУ) с косвенным управлением. Этот малый по размерам прибор со сравнительно высокими точностными, параметрами рассчитан на работу в условиях больших инерционных возбуждений.
Подвес чувствительного элемента жидкостно-терсионный. Период незатухающих колебаний в расчетной (60°) широте «150 мин. Нормальная работа ГКУ возможна в широтах до 80° в одном из режимов: ГК (основной режим) при скорости до 50 уз и гироазимут (вспомогательный режим) до 70 уз.
Точность показаний ГКУ в режиме ГК при различных условиях плавания в широтах меньше 70° характеризуется следующими цифрами: погрешность на неподвижном судне ± 0,5°; погрешность на прямом курсе при постоянной скорости до 30 уз и качке с амплитудой 2°±0,8°, с амплитудой 25° ± 1,5°, погрешность при маневрировании на скоростях до 30 уз достигает ±2°. Вообще ГКУ выдерживает воздействие качки с амплитудой 45° и рыскания судна со скоростью 12° в секунду при амплитуде рыскания 30°. В режиме гироазимута допустимая скорость дрейфа ±1° в час. Время ускоренного приведения ГКУ в меридиан 60 мин. Предельная погрешность синхронной передачи ±0,1°. В связи с высокой рабочей температурой поддерживающей жидкости (75°С) введен электрический подогрев. Гарантийный срок работы гироблока 10000 ч. Время непрерывной работы ГКУ 2000 ч.
Питание ГКУ осуществляется от судовой сети трехфазного переменного тока (380 или 220 В, 50 Гц).
Устройство и принцип работы курсоуказателя.
Принципиальное устройство двухрежимного курсоуказателя с электромагнитным управлением показано на рис. 1.1.
Гиромотор заключен в герметически запаянную сферу — поплавок 1 , состоящую из двух полусфер, соединенных между собой короткой цилиндрической шейкой. Гиросфера помещена во внешнюю следящую сферу 2, и пространство между ними заполнено тяжелой вязкой (поддерживающей) жидкостью 3. Плотность поддерживающей жидкости и вес гиросферы выбраны так, что при определенной температуре жидкости гиросфера приобретает нейтральную плавучесть. Рабочая температура поддерживается автоматически системой терморегулирования.
Гиросфера связана со следящей сферой двумя парами торсионов, которые служат для наложения на гироскоп управляющих моментов и центрирования гиросферы относительно следящей сферы. Вертикальные торсионы 6 одним концом закреплены в корпусе следящей сферы, а другим — в кардановом кольце 9, свободно охватывающем шейку гиросферы. Горизонтальные торсионы 11 одним концом прикреплены к оболочке гиросферы, а другим—к карданному кольцу гироскопа. Жесткость на кручение пары вертикальных торсионов и жесткость пары горизонтальных торсионов рассчитаны определенным образом, исходя из конструктивных параметров прибора.
Все четыре торсиона установлены в плоскости, перпендикулярной оси собственного вращения гироскопа, и позволяют следящей сфере поворачиваться относительно гиросферы .вокруг горизонтальных или вертикальных торсионов и вместе с оболочкой гиросферы — вокруг оси кинетического момента.
Питание на гиромотор и статоры двухкомпонентных датчиков угла 4, расположенных по оси собственного
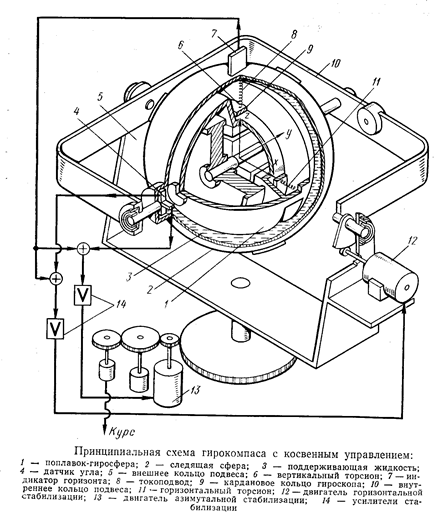
вращения гироскопа на противоположных сторонах гиросферы 1, подается по гибким спиральным токоподводам 8, свободно навитым вокруг торсионов или через сами торсионы.
Следящая сфера 2 имеет снаружи цапфы, расположенные параллельно оси собственного вращения гироскопа, посредством которых она свободно подвешена на подшипниках в горизонтальном внутреннем кольце 10 стабилизированного карданова подвеса.
Горизонтальное кольцо 10 подвешено по оси, параллельной оси горизонтальных торсионов, в вертикальном внешнем кольце подвеса 5, которое может поворачиваться вокруг вертикальной оси, образованной подшипниками, установленными в корпусе прибора. Прибор своим основанием крепится к палубе.
Вертикальное кольцо 5 приводится во вращение через зубчатую передачу двигателем азимутальной стабилизации 13, установленным в корпусе прибора. Это вращение передается на вертикальные торсионы, которые накладывают на гироскоп вертикальный момент. В вертикальном кольце .5 установлен двигатель горизонтальной стабилизации 12, который через зубчатую передачу поворачивает горизонтальное кольцо 10 вокруг его оси подвеса, закручивая горизонтальные торсноны и накладывая таким образом на гироскоп горизонтальный момент. Стабилизация следящей сферы в горизонте вокруг оси ее подвеса осуществляется смещением вниз центра тяжести сферы относительно оси подвеса.
Двухкомпонентные индукционные датчики угла, статоры которых расположены на гиросфере 1, а съемные (роторные) обмотки закреплены на следящей сфере 2, вырабатывают напряжения, пропорциональные углам рассогласования между гиросферой и следящей сферой относительно вертикальных и горизонтальных торсионов. Датчики угла включены по дифференциальной схеме, что исключает погрешности в измерении углов рассогласования, вызываемые линейными перемещениями гиросферы относительно следящей сферы. Сигналы рассогласования от датчиков угла через усилители стабилизации 14, расположенные в самом приборе, поступают на соответствующие двигатели, которые обеспечивают непрерывные согласования следящей сферы 2 с гиросферой /. Таким образом, прибор работает в режиме свободного гироскопа.
Для превращения свободного гироскопа в гирокомпас необходимо наложить на гироскоп моменты вокруг горизонтальной xx и вертикальной zz осей, пропорциольные углу отклонения главной оси гироскопа от плоскости горизонта.
Связь гироскопа с плоскостью горизонта осуществляется при помощи индикатора горизонта 7, представляющего собой высокочувствительный физический маятник с индукционным съемом сигнала, задемпфированный вязкой жидкостью.
Индикатор горизонта 7 можно установить непосредственно на гиросфере 1 или следящей сфере 2. Однако из конструктивных соображений он установлен на следящей сфере так, что реагирует только на отклонения оси подвеса yy следящей сферы от плоскости горизонта и вырабатывает напряжение, пропорциональное этому отклонению. Сигнал индикатора горизонта 7 суммируется в противофазе с сигналами датчиков угла, и разность этих сигналов подается через усилители на двигатели стабилизации 12 или 13.
Двигатели 12, 13 приводят во вращение следящую сферу 2 относительно горизонтальных и вертикальных торсионов до тех пор, пока сигнал индикатора горизонта 7, поданный в схему суммирования в определенном масштабе, не сравняется с сигналом от соответствующего датчика угла. Горизонтальные и вертикальные торсионы окажутся закрученными на углы, пропорциональные углу отклонения главной оси гироскопа от горизонта, что обеспечивается схемой суммирования сигналов. Момент, прикладываемый вследствие этого горизонтальными торсионами 11 к гироскопу, аналогичен маятниковому моменту обычных маятниковых гирокомпасов. Под действием этого момента гироскоп прецессирует в азимуте, совершая незатухающие колебания около меридиана.
Момент, прикладываемый вертикальными торсионами 6, аналогичен демпфирующему моменту маятниковых гирокомпасов, под действием которого гироскоп прецессирует к горизонту. В результате совместного действия этих моментов гироскоп, совершая затухающие колебания, период и фактор которых зависят от выбранных параметров прибора, будет приходить в меридиан.
Для перехода от режима гирокомпаса в режим гпроазимута достаточно лишь отключить горизонтальный маятниковый момент, сохранив вертикальный момент, необходимый для удержания оси гироскопа в плоскости горизонта. Практически это осуществляется простым поворотом ручки переключателя режимов, установленного в приборе. Для компенсации методических ошибок, возникающих в показаниях прибора при работе в режимах гирокомпаса и гиро-азимута, в приборе имеется электромеханическое счетно-решающее устройство, которое вырабатывает необходимые сигналы, поступающие на двигатели стабилизации.
Величины корректирующих моментов, прикладываемых по обеим осям гироскопа в результате ввода сигналов в следящие системы, изменяются в зависимости от скорости, курса и широты таким образом, что главная ось гироскопа удерживается в направлении на N как в режиме гирокомпаса, так и в режиме гироазимута. Показания курса, выработанного прибором, транслируются датчиками грубого и точного отсчета, например сельсинами, связанными с двигателем азимутальной стабилизации.
Особенности работы курсоуказателя в режиме гирокомпаса.
Схема управления. Для того чтобы дать общее представление об устройстве гирокомпаса с электромагнитным управлением и объяснить наиболее интересные особенности его работы, воспользуемся лишь самыми необходимыми теоретическими положениями
Уравнения движения гирокомпаса с управлением ЧЭ посредством торсионов (см. рис.1) при обычно принимаемых упрощениях можно представить выражениями:
Н [d a /dt-(u cos j +VE /R) b + (u sin j +VE /R tg j )] = СГ ( b - b c ); (1.1)
Н [d b /dt-VN /R+(u cos j +VN /R) a ] =-С B ( a - a c );
где Н — кинетический момент гироскопа;
b — угол отклонения гироскопа от горизонта в вертикальной плоскости;
a — угол отклонения гироскопа от меридиана в горизонтальной плоскости;
aс , bс — координаты следящей сферы, отсчитываемые аналогично координатам a и b гироскопа;
j — широта места;
и — угловая скорость вращения Земли;
R — радиус Земли;
VN ,VE — северная и восточная составляющие скорости судна;
( b - b c ) —угол рассогласования следящей сферы относительно ги-росферы вокруг горизонтальных торсионов, т. е. угол закрутки горизонтальных торсионов, обладающих жесткостью Сг ;
( a - a c ) —угол рассогласования следящей сферы относительно гиросферы, т. е. угол закрутки вертикальных торсионов, обладающих жесткостью Св ;
--> ЧИТАТЬ ПОЛНОСТЬЮ <--