Реферат: Исследование устойчивости разомкнутой системы электропривода ТПН-АД
1. Природа возникновения колебаний, виды и особенности колебательных процессов
Одним из актуальных вопросов исследования динамических режимов работы электропривода «Тиристорный преобразователь напряжения – асинхронный двигатель» является исследование устойчивости ЭП. Как показали эксперименты, в разомкнутых системах ЭП ТПН-АД с синхронизацией с напряжением сети на рабочем участке механических характеристик, в ряде случаев, могут наблюдаться устойчивые автоколебания выходных величин [4,40,42]. Колебания нарушают нормальную работу разомкнутых систем ЭП, усложняют расчет и настройку замкнутых систем, ухудшают качество регулирования координат и энергетику ЭП.
Характер и количественные показатели колебательных процессов весьма различны. Они зависят от множества параметров и факторов, в число которых можно включить
величину угла включения вентилей;
параметры АД;
моменты нагрузки на валу АД;
суммарный приведенный момент инерции электропривода;
начальные электромагнитные условия (НЭМУ);
начальную скорость АД;
схемотехническую конструкцию ТПН и способ синхронизации вентилей.
Это определяет задачу по разработке методов исследования устойчивости разомкнутой системы электропривода ТПН-АД, а также оценки влияния различных факторов и параметров ЭП на вид и характер колебательных процессов.
Появление автоколебаний в разомкнутых системах ЭП ТПН-АД, возможно объяснить наличием положительной обратной связи между углом сдвига тока нагрузки и амплитудой первой гармоники выходного напряжения преобразователя, а так же нелинейностью параметров электропривода. Колебательный процесс можно условно разделить на две категории - режимы «малых» и «больших» колебаний [4].
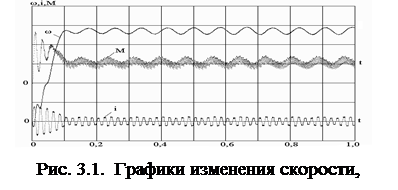
«Малые» колебания - это незатухающие гармонические колебания выходных параметров АД при условии, что скорость ротора изменяется в пределах первого квадранта (не превышает синхронную, т.е. 0 < w <w0). Физически, этот вид автоколебаний связан с обменом энергии между электромагнитными контурами и инерционными маховыми массами электропривода. Характерные графики изменения скорости, момента и тока статора АД в режиме «малых» колебаний представлены на рис. 3.1. Графики построены при помощи модели электропривода ТПН-АД.
Особенности процессов в режиме больших колебаний позволяют говорить о том, что их возникновение связано, не столько с изменением скорости ротора и обменом энергии, сколько с колебательным движением и взаимодействием между собой обобщенных векторов напряжения сети и ЭДС обмоток статора, а так же потокосцеплений статора и ротора.
Вторая категория – это режим больших колебаний (рис 3.2). В данном случае скорость двигателя может превысить синхронную, а область колебаний охватывает первый и второй квадранты.
2. Методика исследования устойчивости разомкнутой системы электропривода ТПН-АД
Динамические свойства асинхронных двигателей. Реальные переходные процессы асинхронного электропривода сопровождаются изменением скорости двигателя. Однако, в ряде случаев, полезно использовать результаты решения системы дифференциальных уравнений асинхронной машины при постоянной скорости ее вращения. Расчетная структурная схема разомкнутой системы электропривода ТПН-АД изображена на рис.3.3 [10, 40].
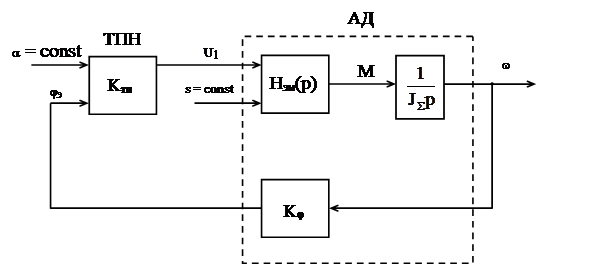 |
Рис. 3.3. Расчетная структурная схема разомкнутой системы ЭП ТПН-АД
Характерной особенностью приведенной схемы является применение зависимости фазы тока не от скольжения, а от текущего значения скорости. При таком представлении выходные сигналы всех звеньев имеют прямую зависимость от входных сигналов, а внутренний контур системы представляет положительную обратную связь. При математическом описании элементов структурной схемы выполняется учет их нелинейных свойств.
Асинхронный двигатель изображается тремя звеньями с передаточными функциями, которые обозначаются
![]() – передаточная функция электромагнитной части АД;
– передаточная функция электромагнитной части АД;
 – передаточная функция электромеханической части ЭП;
– передаточная функция электромеханической части ЭП;
![]() – передаточная функция звена внутренней обратной связи, по углу нагрузки;
– передаточная функция звена внутренней обратной связи, по углу нагрузки;
где Кj - ![]() - переменная величина, зависящая от значения скорости;
- переменная величина, зависящая от значения скорости;
JS – суммарный приведенный момент инерции ЭП.
Тиристорный преобразователь представлен усилительным звеном с коэффициентом усиления Ктп, который при переходе к приращениям определяется [9]
 , (3.1)
, (3.1)
в точке, определяемой углом управления a и скольжением s.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--