Реферат: Кинематический и силовой расчёт механизма. Определение осевого момента инерции маховика. Проекти
Е4 – кінетична енергія ланки №4;
Е5 – кінетична енергія ланки №5.
![]()
![]()
![]()
![]()
![]()
![]()
Визначаємо приведений осьовий момент інерції:
![]()
Результати розрахунків для інших положень механізму проводимо аналогічно, а результати заносимо в таблицю №4.
Таблиця №4
| Од. вимір | Положення механізму | ||||||||
| 0,8 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | ||
| J3 | кг·м2 | 0,4752 | 0,,4752 | 0,4752 | 0,4752 | 0,4752 | 0,4752 | 0,4752 | 0,4752 |
| E1 | Дж | 1,4256 | 1,4256 | 1,4256 | 1,4256 | 1,4256 | 1,4256 | 1,4256 | 1,4256 |
| E2 | Дж | 0 | 1,34639 | 1,51323 | 0 | 0,74287 | 1,7936 | 1,7936 | 0,876 |
| E3 | Дж | 0 | 0,88483 | 0,88422 | 0 | 0,22197 | 0,43224 | 0,37308 | 0,22257 |
| E4 | Дж | 0 | 1,211096 | 1,630886 | 0 | 0,33696 | 0,66044 | 0,56946 | 0,33696 |
| E5 | Дж | 1,9008 | 5,342626 | 5,929136 | 1,9008 | 3,2026 | 4,78208 | 4,63694 | 1,91073 |
| Eмех | Дж | 0,000594 | 0,001669 | 0,001853 | 0,000594 | 0,001008 | 0,001496 | 0,001449 | 0,000597 |
| Jпр | кг·м2 | 64 | 180 | 200 | 64 | 109 | 161 | 161 | 64 |
| (Jпр)гр | мм | 0,004386 | 0,002984 | 0,002984 | 0,004386 | 0,006115 | 0,007278 | 0,007278 | 0,006115 |
Визначаємо масштабний коефіцієнт:
![]()
де: Y2 – відстань на осі абсцис відповідаюча даному осьовому моменту.
Перераховуємо усі отримані осьові моменти інерції в графічні аналоги:
![]()
Будуємо систему координат. По осі ординат відмічаємо кут повороту механізму, а по осі абсцис на променях проведених з точок кута повороту проводимо графічні аналоги приведеного осьового моменту. З’єднуємо отримані точки і отримуємо графік приведеного моменту Jпр=ƒ(φ).
2.6 Побудова діаграми енергомас.
Будуємо вісь координат. До цієї вісі проводимо промені з графіка приведеного осьового моменту Jпр=ƒ(φ) і зміни кінетичної енергії ΔЕ=ƒ(φ). На перетині відповідних променів отримуємо точки з’єднавши які, отримуємо діаграму енергомас (петля Віттенбауера).
3. Проектування профілю кулачкового механізму.
3.1 Вихідні данні.
 Схема кулачкового механізму (мал. 4)
Схема кулачкового механізму (мал. 4)
![]() ω
ω
мал. 6).
φп – 90˚ (фаза підьому штовхача);
φс – 30˚ (фаза далекого стояння);
φо - 160˚ (фаза спускання);
ω – 85 1 /С (кутова швидкість);
δ - 35˚ (кут тиску);
h – 30 мм (хід штовхача).
?????? ???????????
 |
φ
φп φс φо
мал. 7).
3.2 Визначення закону руху штовхача.
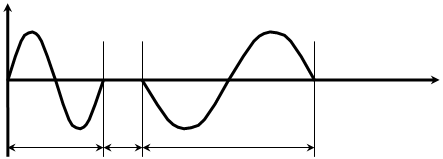
Будуємо графічний аналог прискорення штовхача ![]() . По осі ординат відкладаємо аналог прискорення
. По осі ординат відкладаємо аналог прискорення ![]() , а по вісі абсцис кут повороту φ.
, а по вісі абсцис кут повороту φ.
Визначаємо масштабний коефіцієнт по вісі абсцис:
![]()
де: Х – довільний відрізок вздовж вісі абсцис.
Цей відрізок розбиваємо на три ділянки Хп , Хс та Хо , пропорційно кутам повороту φп , φс , φо . Відрізки Хп та Хо розбиваємо на вісім рівних частин. На відрізку Хп , задаємося амплітудою Yп =95 мм.
Визначаємо амплітуду на відрізку Хn :
Згідно вихідних даних будуємо графічний аналог прискорення ![]() .
.
Визначаємо міжполюсну відстань:
![]()
Методом графічного інтегрування графічного аналога прискорень отримуємо графічний аналог швидкості.