Реферат: Коррекция дискретных систем управления
 .
.
Решение : Исходную передаточную функцию можно представить в виде

Передаточной функции соответствует структурная схема рис. 6.
 |
| ||||||
| |||||||
| |||||||
 | |||||||
Реализации дискретных передаточных функций с помощью импульсных RC- цепей
В процессе дискретной коррекции определяем структуру корректирующего звена в форме z - преобразования. Корректирующее звено можно представить в виде схемы, приведенной на рис. 7.
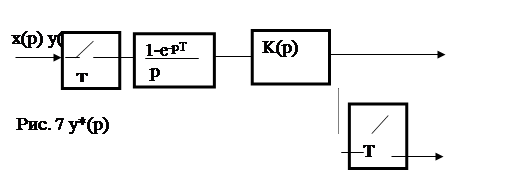 |
Включение фиксатора последовательно звеном, реализующим передаточную функцию корректирующего устройства, упрощает структуру непрерывной части корректирующего устройства т. к. при этом на его входе не импульсы, а ступенчатый сигнал.
 (6)
(6)
На основании этого соотношения можно определить передаточную функцию непрерывного корректирующего устройства.
Для определения передаточной функции непрерывного корректирующего устройства соотношение (6) можно представить в виде
 (7)
(7)
Рассмотрим примеры
Пример 2. Реализовать дискретную передаточную функцию – Kk (z) с помощью импульсных RC- цепей.
![]()
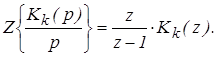
Решение : Передаточную функцию непрерывного корректирующего устройства можно определить из соотношения.

Определим обратное z - преобразование

При этом
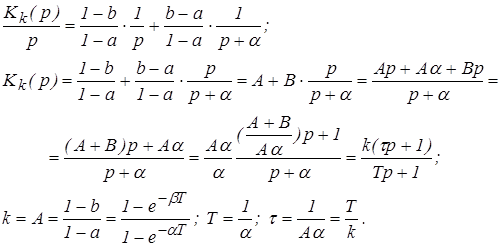
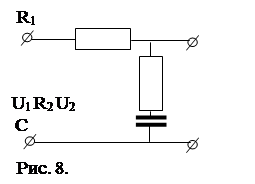
Полученная структура передаточной функции корректирующего устройства может быть реализована с помощью RC-цепи, схема которой приведена на рис. 8. Если T > t то получим передаточную функцию интегрирующего контура.
Пример 3. Реализовать дискретную передаточную функцию – Kk (z) с помощью импульсных RC- цепей
![]()
Решение: Передаточную функцию непрерывного корректирующего устройства можно определить из соотношения.

Определим обратноеz - преобразование

При этом
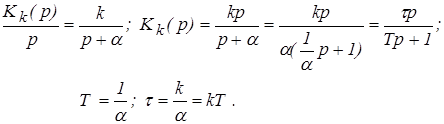
Это передаточная функция реального дифференцирующего звена, она может быть реализована с помощью RC-цепи, схема которой приведена на рис. 9.
 | 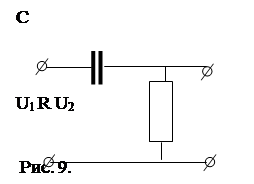 |
Передаточная функция этой цепи имеет вид

Реализации дискретных передаточных функций с помощью цифрового моделирования
Этот метод используется в цифровых системах управления содержащих в своем составе цифровое вычислительное устройство (микропроцессор ЦВМ, микро-ЭВМ, и т. д.). При этом передаточная функция корректирующего устройства реализуется путем изменения алгоритма функционирования цифрового автомата, т. е. методом программирования.