Реферат: Однокристальные микропроцессорные устройства. Архитектура и виды микроЭВМ и микроконтроллеров
1. Центральное процессорное устройство – оно принимает из памяти программ коды команд, декодирует их и исполняет. В него входят арифметико-логическое устройство (АЛУ), регистры и цепи управления.
2. Память программ – она хранит коды команд, последовательность которых формирует программу микроконтроллера.
3. Оперативная память данных (ОЗУ) – здесь хранятся переменные программ. У многих МК здесь также расположен стек.
4. Тактовый генератор – инициирует работу контроллера, и от него зависит скорость работы МК.
5. Цепь сброса – приводит МК в исходное состояние, чем определяет правильный запуск его работы.
6. Последовательный порт – позволяет обмениваться данными с внешними устройствами при малом числе проводов.
7. Цифровой порт ввода-вывода – с помощью его линий можно управлять одновременно несколькими внешними устройствами, адресуя их.
8. Таймер – задаёт временные интервалы.
9. Сторожевой таймер – специальный таймер, предназначенный для предотвращения системных сбоев программы: после запуска он начинает отсчёт заданного временного интервала. Если программа не перезапустит его до истечения этого интервала времени, сторожевой таймер перезапустит МК. То есть программа должна сигнализировать таймеру, что с ней всё в порядке. Если такого сигнала нет, то в работе программы по какой-то причине произошёл сбой.
Наиболее распространён ОмК ф. Intel 51-й серии и его клоны от разных производителей. Кроме этого, появились интегральные схемы, использующие сокращённый набор команд процессора (RISK – ReducedInstructionSetComputers). Среди них популярны контроллеры ф. Microchip семейства PIC (Peripheral Interface Controller). Также лидирующее место занимают RISK ОмК из серии AVR (например, ф. Аtmel). PIC-контроллеры выпускают многие фирмы, кому не лень их делать.
PIC-контроллер имеет также RISK-процессор, только архитектура процессора другая и кодовое слово не 8 бит, а 11–15 бит.
Основное отличие RISK-процессора от 51-й серии ф. Intel, например, то, что команда в нём исполняется за один такт, и число команд ограничено – обычно около 60–70 штук. Поэтому в ходе изучения нужно рассматривать оба типа микроконтроллеров. Как обычный ОмК нужно рассмотреть контроллер 51-й серии (и как самый используемый тип контроллеров). А в качестве RISK-контроллера необходимо рассмотреть PIC-контроллеры и контроллер AVR ф. Аtmel, так как для него много всевозможного бесплатного обеспечения, используемого для программирования и демонстрации.
Впрочем, нет принципиальной разницы, на каком оборудовании изучаются ОмК, так как сейчас все они часто программируется на языке С . Но ресурсы в разных процессорах разные и, в зависимости от модели, что-то может присутствовать, а что-то может быть упущено. После контроллера 51-й серии целесообразно рассматривать AVR-контроллеры, а затем идут atmega и arm как дальнейшее развитие. Достаточно рассмотреть и изучить один процессор – и полученные знания легко распространяются на все остальное. Новые ресурсы и возможности появляются, а принципы остаются всё те же (кроме PIC-контроллеров).
Семейство MCS-51, по сути дела, стало прародителем семейств так называемых PIC и AVR микроконтроллеров, выполненных по Гарвардской архитектуре процессора.
В случае высоких требований к быстродействию МК, при условии их низкой стоимости и энергопотребления, разработки на основе МК MCS-51 применяются реже, уступая место разработкам на PIC и AVR микроконтроллерах.
В целом, многообразие современных ОмК чрезвычайно велико. Зачастую их делят на виды [5]:
– встраиваемые 8-разрядные;
– 16- и 32-разрядные МК;
– цифровые сигнальные процессоры (DSP).
Встраиваемые (embedded) микроконтроллеры имеют все ресурсы (память, устройства ввода-вывода, и т. д.) на одном кристалле с процессорным ядром. На такой контроллер подаются питание и тактовые сигналы. В них процессорное ядро может быть общего плана или разработано специально для данного МК. Основное назначение встраиваемых МК – обеспечить гибкое программируемое управление объектами и связь с внешними устройствами. Они не приспособлены для выполнения комплекса сложных функций.
Такие МК содержат большое число вспомогательных устройств, за счёт чего реализуется их включение в конкретную систему с использованием минимального числа дополнительных компонентов. Обобщённая структура такого контроллера приведена на рисунке 8.
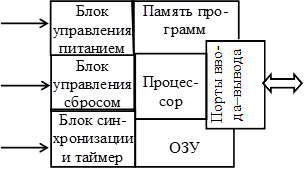
Рис. 8 - Обобщённая структура простого встраиваемого микроконтроллера
микропроцессор микроконтроллер шина
В состав таких МК обычно входят схема начального запуска (Reset); генератор тактовых импульсов; центральный процессор; память программ (ПЗУ или ППЗУ, ЭППЗУ); память данных (ОЗУ); средства ввода-вывода данных; таймеры, фиксирующие число командных циклов.
Сложные встраиваемые МК реализуют дополнительные возможности: встроенный монитор-отладчик программ; внутренние средства программирования памяти программ; обработка прерываний от различных источников; аналоговый ввод-вывод; последовательный ввод-вывод (синхронный и асинхронный); параллельный ввод-вывод (включая интерфейс с компьютером); подключение внешней памяти (микропроцессорный режим).
Типичные значения частоты тактовых сигналов различных МК составляют 10–20 МГц. Главным фактором, ограничивающим их скорость, является время доступа к памяти.
Микроконтроллеры с внешней памятью (особенно 16- и 32-разрядные) используют только внешнюю память, которая включает в себя как память программ ПЗУ (ROM), так и некоторый объём памяти данных ОЗУ (RAM), требуемый для конкретного применения. Структура МК с внешней памятью приведена на рисунке 9.
Примером такого МК служит БИС ф. Intel 80188. Это микропроцессор 8088 (используемый в компьютерах IBMPC), интегрированный на общем кристалле с дополнительными схемами, реализующими ряд стандартных функций (прерывания и прямой доступ к памяти DMA). Здесь в одном корпусе объединены устройства, необходимые для реализации систем, в которых могут использоваться функциональные возможности и ПО микропроцессора 8088.